I want you to imagine that you're a student in my lab. What I want you to do is to create a biologically inspired design. And so here's the challenge: I want you to help me create a fully 3D, dynamic, parameterized contact model. The translation of that is, could you help me build a foot? And it is a true challenge, and I do want you to help me. Of course, in the challenge there is a prize. It's not quite the TED Prize, but it is an exclusive t-shirt from our lab. So please send me your ideas about how to design a foot.
我想讓你想像一下,你是我實驗室裡的一個學生。 我想讓你做的是提出一個由生物激發的設計。 挑戰是這樣的: 我想讓你幫我製造出一個全部是三維,動態,參數化的接觸模型。 解釋一下,就是能不能幫我造一隻腳? 這件事真的頗具挑戰性,我確實需要你來幫我。 當然,這一挑戰是有獎勵的。 不能算是TED的獎品,而是我們實驗室提供的特別版T卹。 因此,請將你們就如何設計一隻腳的想法發給我。
Now if we want to design a foot, what do we have to do? We have to first know what a foot is. If we go to the dictionary, it says, "It's the lower extremity of a leg that is in direct contact with the ground in standing or walking" That's the traditional definition. But if you wanted to really do research, what do you have to do? You have to go to the literature and look up what's known about feet. So you go to the literature. (Laughter)
如果我們想設計一隻腳,我們必須要做哪些呢? 首先我們要知道腳是什麼。 如果去查看字典,字典上解釋說:“腳是腿的最末端 在站立或行走時直接接觸地面的部位。” 這是傳統的定義。 但如果你真的想要做研究,要做哪些呢? 你要去查閱文獻,看關於腳人們都知道了些哪些。 所以你去查閱文獻。(大笑)
Maybe you're familiar with this literature. The problem is, there are many, many feet. How do you do this? You need to survey all feet and extract the principles of how they work. And I want you to help me do that in this next clip. As you see this clip, look for principles, and also think about experiments that you might design in order to understand how a foot works.
也許你很熟悉這些文獻。 問題是,這裡有很多很多只腳。 該怎麼辦呢? 你需要研究所有的腳,並提煉出這些腳是如何工作的原理。 在下一張圖上,我想讓你來幫我做這件事。 當你看這張圖時,注意尋找原理。 並且想一下你可能會設計的實驗 為了弄明白腳是如何工作的。
See any common themes? Principles? What would you do? What experiments would you run? Wow. (Applause) Our research on the biomechanics of animal locomotion has allowed us to make a blueprint for a foot. It's a design inspired by nature, but it's not a copy of any specific foot you just looked at, but it's a synthesis of the secrets of many, many feet.
看到有什麼共同點了嗎?共同的原理? 你要怎麼做? 要進行什麼樣的實驗? 哇。(鼓掌) 我們關於動物運動的生物力學研究 讓我們繪製一隻腳的藍圖。 這是一個由自然啟發的設計,但不是複製你剛才看到的某只特定的腳, 而是綜合了許多許多只腳的秘密。
Now it turns out that animals can go anywhere. They can locomote on substrates that vary as you saw -- in the probability of contact, the movement of that surface and the type of footholds that are present. If you want to study how a foot works, we're going to have to simulate those surfaces, or simulate that debris. When we did that, here's a new experiment that we did: we put an animal and had it run -- this grass spider -- on a surface with 99 percent of the contact area removed. But it didn't even slow down the animal. It's still running at the human equivalent of 300 miles per hour.
事實是動物哪兒都能去。 它們能在各種不同的表面上移動—— 這些變化因素包括接觸形勢,表面的運動 以及它們所呈現的不同的立足點。 如果你想要研究腳是如何工作的 我們就需要模擬這些表面,或那些碎片。 當我們進行模擬時,這裡是我們做的一個新實驗: 我們將一隻動物放上去然後讓它跑——這是一隻草蛛—— 被放在一個99%的接觸區域都已經被移走的表面上。 但它甚至沒有减慢動物的移動。 草蛛仍以相當於人類300英里/小時的速度移動著。
Now how could it do that? Well, look more carefully. When we slow it down 50 times we see how the leg is hitting that simulated debris. The leg is acting as a foot. And in fact, the animal contacts other parts of its leg more frequently than the traditionally defined foot. The foot is distributed along the whole leg. You can do another experiment where you can take a cockroach with a foot, and you can remove its foot. I'm passing some cockroaches around. Take a look at their feet. Without a foot, here's what it does. It doesn't even slow down. It can run the same speed without even that segment. No problem for the cockroach -- they can grow them back, if you care. How do they do it? Look carefully: this is slowed down 100 times, and watch what it's doing with the rest of its leg. It's acting, again, as a distributed foot -- very effective.
它是怎麼辦到的?好的,仔細看。 當我們將其速度减少50倍,就可以看到腿是如何接觸那些模擬碎片的。 腿發揮了腳的功能。 事實上,動物用腿的其他部位接觸表面 比用傳統定義界定的足頻繁得多。 沿著整條腿分佈的都是腳。 你可以做另一個實驗,用一隻腳的蟑螂, 然後把它所有的腳都去掉。 我在分發一些蟑螂。來看看他們的腳是什麼樣子的。 沒有了腳,看他們怎麼走。它甚至都沒有慢下來。 沒有腳它們仍可以以同樣的速度移動。 蟑螂不會出現任何問題——它們還能把腳長回來,如果你在意。 它們是怎麼做到的? 仔細看:這是放慢100倍後, 觀察他們在用腿的其餘部分做什麼。 又一次,腿作為被廣泛分佈的足了。 非常有效。
Now, the question we had is, how general is a distributed foot? And the next behavior I'll show you of this animal just stunned us the first time that we saw it. Journalists, this is off the record; it's embargoed. Take a look at what that is! That's a bipedal octopus that's disguised as a rolling coconut. It was discovered by Christina Huffard and filmed by Sea Studios, right here from Monterey.
現在問題是,到底有多少動物有類似的分佈足? 下面將要為你們展示的這個動物,我們第一次看時就感到很震驚。 記者們,這可是沒人報導過的,被禁止的—— 看那是什麼! 這個兩足的章魚佯裝成一個可以滾動的椰子。 是克里斯蒂娜•胡法德發現了它 這影片由海洋工作室(海工作室),就在蒙特瑞拍攝的。
We've also described another species of bipedal octopus. This one disguises itself as floating algae. It walks on two legs and it holds the other arms up in the air so that it can't be seen. (Applause) And look what it does with its foot to get over challenging terrain. It uses that beautiful distributed foot to make it as if those obstacles are not even there -- truly extraordinary.
我們也描述了另一種雙足章魚。 這一只將自己偽裝成浮動的海藻。 它用兩條腿走路然後將兩隻胳膊高舉在空中,以保證不讓其他生物看見。 (鼓掌) 注意看,當他們要通過崎嶇不平的地面時是如何使用腳的。 它用它們那美麗均勻分佈的足,使得這些障礙好似不存在一般。 真的很特別。
In 1951, Escher made this drawing. He thought he created an animal fantasy. But we know that art imitates life, and it turns out nature, three million years ago, evolved the next animal. It's a shrimp-like animal called the stomatopod, and here's how it moves on the beaches of Panama: it actually rolls, and it can even roll uphill. It's the ultimate distributed foot: its whole body in this case is acting like its foot.
在1951年,埃舍爾畫了這幅畫。他覺得自己創造出了一個動物神話。 但是我們知道藝術模仿生命, 事實就是300萬年前,自然進化出下一個動物。 這個像小蝦的動物被稱為口腳類動物, 這裡是它如何在巴拿馬的海灘上移動的: 它其實在滾動,而且它甚至還能向上滾。 這最終是因為均勻分佈的足,在這種情況下,它的整個身子都扮演著腳的角色。
So, if we want to then, to our blueprint, add the first important feature, we want to add distributed foot contact. Not just with the traditional foot, but also the leg, and even of the body. Can this help us inspire the design of novel robots? We biologically inspired this robot, named RHex, built by these extraordinary engineers over the last few years. RHex's foot started off to be quite simple, then it got tuned over time, and ultimately resulted in this half circle. Why is that? The video will show you. Watch where the robot, now, contacts its leg in order to deal with this very difficult terrain. What you'll see, in fact, is that it's using that half circle leg as a distributed foot. Watch it go over this. You can see it here well on this debris. Extraordinary. No sensing, all the control is built right into the tuned legs. Really simple, but beautiful.
因此我們為我們的藍圖上加上第一個重要的特徵, 我們想加上均勻分佈的足的接觸面。 不僅是加在傳統的足部部位,也加在腿上。 而且甚至是在身上。 這能有助於我們設計出新的機器人嗎? 我們受到生物的啟示所創造的機器人,叫做RHex, 它是由這些卓越的工程師在過去幾年間製造出來的。 RHex的腳一開始時非常簡單, 但是它總是隨時間而改變,最後變成了這樣的半圓形。 為什麼呢?接下來的錄像將告訴你答案。 看這個機器人,現在,看它用腿的什麼部位接觸這些有障礙的地表,試圖翻越過去。 你會看到,事實上,它用這半圓形的腳當做均勻分佈的足了。 看它翻越這裡。 你可以從這裡看它穿過這些碎片。 非常棒。沒有傳感裝置,所有的控制組件都裝在這個諧調的腿中了。 很簡單,但非常棒。
Now, you might have noticed something else about the animals when they were running over the rough terrain. And my assistant's going to help me here. When you touched the cockroach leg -- can you get the microphone for him? When you touched the cockroach leg, what did it feel like? Did you notice something?
現在,你可能已經注意到了這些動物的其他方面 當它們跑過崎嶇不平的地表面時。 我的助手在這要幫我一下。 當你摸蟑螂的腿時——你能幫我把話筒遞給他嗎? 當你摸蟑螂的腿時,有什麼感覺? 感覺到什麼不同了嗎?
Boy: Spiny.
男孩:很多刺。
Robert Full: It's spiny, right? It's really spiny, isn't it? It sort of hurts. Maybe we could give it to our curator and see if he'd be brave enough to touch the cockroach. (Laughter)
羅伯特•福爾:很多刺,是嗎?感覺很扎,對不對?有點傷手。 也許我們應該把蟑螂給監護人,看他有沒有勇氣也摸一摸。 (笑)
Chris Anderson: Did you touch it?
克里斯•安德森:你摸過嗎?
RF: So if you look carefully at this, what you see is that they have spines and until a few weeks ago, no one knew what they did. They assumed that they were for protection and for sensory structures. We found that they're for something else -- here's a segment of that spine. They're tuned such that they easily collapse in one direction to pull the leg out from debris, but they're stiff in the other direction so they capture disparities in the surface.
羅伯特•福爾:所以當你很仔細的觀察,會發現上面真的有很多剛毛。 直到幾週前,一直也沒人知道這些刺是用來做什麼的。 他們推測那些刺起到保護以及用來感知周圍結構用的。 後來我們發現它們有別的功效——這裡是剛毛的一部分 它們的構造使得它們都很容易向一個方向傾斜 把一條腿從碎片中拔出, 這些毛很硬,不會彎向另一個方向,因此可以對付不同的表面。
Now crabs don't miss footholds, because they normally move on sand -- until they come to our lab. And where they have a problem with this kind of mesh, because they don't have spines. The crabs are missing spines, so they have a problem in this kind of rough terrain. But of course, we can deal with that because we can produce artificial spines. We can make spines that catch on simulated debris and collapse on removal to easily pull them out. We did that by putting these artificial spines on crabs, as you see here, and then we tested them. Do we really understand that principle of tuning? The answer is, yes! This is slowed down 20-fold, and the crab just zooms across that simulated debris. (Laughter) (Applause) A little better than nature.
螃蟹不需要尋找立足點,因為他們通常在沙子上行走—— 直到他們來到我們的實驗室。 然後他們在這些網子上移動會遇到問題, 因為他們沒有剛毛。 螃蟹由於沒有剛毛,所以在這些不平整的表面上移動會有問題。 但當然,我們能幫助它們, 因為我們可以製造人工剛毛。 我們可以製造人工剛毛,他們能夠吸附在模擬碎片上 而且在我們不需要它們時還能很容易的拔出。 我們把這些人造剛毛裝在螃蟹腿上, 你看,我們測試一下。 我們真正明白調諧的原理了嗎?答案是:對! 這是放慢20倍後的,螃蟹飛速的橫穿過這個模擬碎片。 (笑聲)(掌聲) 比自然形成的稍微好一點。
So to our blueprint, we need to add tuned spines. Now will this help us think about the design of more effective climbing robots? Well, here's RHex: RHex has trouble on rails -- on smooth rails, as you see here. So why not add a spine? My colleagues did this at U. Penn. Dan Koditschek put some steel nails -- very simple version -- on the robot, and here's RHex, now, going over those steel -- those rails. No problem! How does it do it? Let's slow it down and you can see the spines in action. Watch the leg come around, and you'll see it grab on right there. It couldn't do that before; it would just slip and get stuck and tip over. And watch again, right there -- successful.
所以在我們的藍圖上,要加上具有調諧作用的剛毛 。 這些可以幫助我們設計出更會爬牆的機器人嗎? 這是RHex——RHex穿過軌道時遇到了麻煩——在平滑的軌道上,你看。 為什麼不加一根剛毛呢?我的同事幫他加上了。 丹•柯蒂斯將一些鋼釘——非常簡單的型號-裝在機器人上—— 於是現在的RHex,越過那些鋼製的——軌道。沒有問題! 它是怎麼做到的? 我們放慢速度,你就能看到那些剛毛是如何發揮作用的了。 看腿移動過來了,你看它剛好能抓穩。 以前它是辦不到的,只會打滑,卡住然後翻倒。 現在再看一遍,就這樣——成功。
Now just because we have a distributed foot and spines doesn't mean you can climb vertical surfaces. This is really, really difficult. But look at this animal do it! One of the ones I'm passing around is climbing up this vertical surface that's a smooth metal plate. It's extraordinary how fast it can do it -- but if you slow it down, you see something that's quite extraordinary. It's a secret. The animal effectively climbs by slipping and look -- and doing, actually, terribly, with respect to grabbing on the surface. It looks, in fact, like it's swimming up the surface. We can actually model that behavior better as a fluid, if you look at it. The distributed foot, actually, is working more like a paddle.
現在只因為裝上均勻分佈的足以及剛毛 並不代表可以爬上垂直的表面。 這個真的非常,非常難。 但看動物們,它們能辦到! 其中有這樣一個動物,它是在光滑的金屬盤子表面垂直向上爬。 它們的爬行速度快得驚人—— 看如果放慢速度,你會發現一些很神奇的事。 這是個秘密。動物很有效的利用滑動,看- 事實上,糟糕的是,它們在抓取表面。 事實上,看上去像從表面上游了上去。 我們其實可以將這一行為模仿為流動體的,如果你仔細觀察。 這些分佈式足事實上工作原理更像是槳。
The same is true when we looked at this lizard running on fluidized sand. Watch its feet. It's actually functioning as a paddle even though it's interacting with a surface that we normally think of as a solid. This is not different from what my former undergraduate discovered when she figured out how lizards can run on water itself. Can you use this to make a better robot? Martin Buehler did -- who's now at Boston Dynamics -- he took this idea and made RHex to be Aqua RHex. So here's RHex with paddles, now converted into an incredibly maneuverable swimming robot.
當我觀察蜥蜴在流態化的沙子上移動時,結果相同。 看它的腳。 事實上它起到了槳的作用。 即使它接觸的表面通常被我們認為是固體。 這與我以前的一個大學部學生所發現的沒有什麼不同 當她發現蜥蜴是如何在水面上行走的。 可以利用這個製造更好的機器人嗎? 馬丁•比埃勒進行了嘗試——他現在在波士頓動力公司—— 他採用了這個點子並將 RHex改造為水族RHex。 所以RHex有了趟水的槳, 現在被改造為不可思議且操縱靈活的游泳機器人了。
For rough surfaces, though, animals add claws. And you probably feel them if you grabbed it. Did you touch it?
然而對於粗糙的表面,動物為自己添加了爪子。 當你抓住它們時應該能感覺到這些爪子。 你有沒有碰碰它?
CA: I did.
CA:我碰了。
RF: And they do really well at grabbing onto surfaces with these claws. Mark Cutkosky at Stanford University, one of my collaborators, is an extraordinary engineer who developed this technique called Shape Deposition Manufacturing, where he can imbed claws right into an artificial foot. And here's the simple version of a foot for a new robot that I'll show you in a bit. So to our blueprint, let's attach claws. Now if we look at animals, though, to be really maneuverable in all surfaces, the animals use hybrid mechanisms that include claws, and spines, and hairs, and pads, and glue, and capillary adhesion and a whole bunch of other things. These are all from different insects. There's an ant crawling up a vertical surface. Let's look at that ant.
RF:它們可以很有效的利用這些爪子鉗住表面。 斯坦福大學的馬克•庫特科斯基,我的一位同事,是一位傑出的工程師 他發明了一種技術叫做“形狀沉積製造", 利用這種技術,他可以將爪子嵌入人工足中。 這裡有一個新機器人腳的簡易版本,我給你們看看。 在我們的藍圖上加上爪子。 現在讓我們看看那些真正能在任何表面上移動的動物, 它們都要用到混合動力機制 包括爪子,刺,毛髮,肉趾,膠,毛細管粘附 還有很多其他的東西。 這些都是來自不同的昆蟲。 這裡有一隻螞蟻在垂直的表面上往上爬。 讓我們來看一下這隻螞蟻。
This is the foot of an ant. You see the hairs and the claws and this thing here. This is when its foot's in the air. Watch what happens when the foot goes onto your sandwich. You see what happens? That pad comes out. And that's where the glue is. Here from underneath is an ant foot, and when the claws don't dig in, that pad automatically comes out without the ant doing anything. It just extrudes. And this was a hard shot to get -- I think this is the shot of the ant foot on the superstrings. So it's pretty tough to do. This is what it looks like close up -- here's the ant foot, and there's the glue.
這是螞蟻的一隻腳。你看這裡有毛髮以及爪子。 這是螞蟻自然狀態下的腳。 觀察這腳放在你的三明治上會發生些什麼。 看到發生了些什麼了嗎? 這些墊伸展出來。這就是膠所在的地方。 這下面是一隻螞蟻腳。 當爪子不深入抓取時,墊會自動出來不需要螞蟻做任何事情。 它就自己出來。 很難拍攝到這種狀態——這大概是在超弦狀態下拍攝的螞蟻腳。 真的很難辦到。 這就是近看的效果—— 這是一隻螞蟻腳,然後這裡是膠狀物。
And we discovered this glue may be an interesting two-phase mixture. It certainly helps it to hold on. So to our blueprint, we stick on some sticky pads. Now you might think for smooth surfaces we get inspiration here. Now we have something better here. The gecko's a really great example of nanotechnology in nature. These are its feet. They're -- almost look alien. And the secret, which they stick on with, involves their hairy toes. They can run up a surface at a meter per second, take 30 steps in that one second -- you can hardly see them. If we slow it down, they attach their feet at eight milliseconds, and detach them in 16 milliseconds. And when you watch how they detach it, it is bizarre. They peel away from the surface like you'd peel away a piece of tape. Very strange. How do they stick?
而且我們發現這些膠狀物可能是兩相混合物。 這顯然可以幫助它們抓住牆壁。 所以要在我們的藍圖上添加黏膠墊。 現在你可以考慮光滑表面了,因為我們已經有了相應的靈感。 在這裡我們有些更好的。 壁虎絕對是自然界中最好的納米技術例子。 這些是他的腳。 他們看起來——甚至像外星人的腳。而且秘密在於 他們有毛茸茸的腳趾頭。 它們可以以1公尺/秒的速度在表面上移動。 一秒鐘內走30步——你幾乎都看不到它們。 但如果我們將這一過程放慢,會發現它們的腳與表面接觸時間僅為8毫秒, 而腳離開表面的時間僅為16毫秒。 當你觀察它們是如何將腳與表面分開時,會感覺很奇怪。 他們把腳從表面撕開,就像你把膠帶撕開一樣。 很奇怪。他們是怎麼黏上的?
If you look at their feet, they have leaf-like structures called linalae with millions of hairs. And each hair has the worst case of split ends possible. It has a hundred to a thousand split ends, and that's the secret, because it allows intimate contact. The gecko has a billion of these 200-nanometer-sized split ends. And they don't stick by glue, or they don't work like Velcro, or they don't work with suction. We discovered they work by intermolecular forces alone. So to our blueprint, we split some hairs. This has inspired the design of the first self-cleaning dry adhesive -- the patent issued, we're happy to say. And here's the simplest version in nature, and here's my collaborator Ron Fearing's attempt at an artificial version of this dry adhesive made from polyurethane. And here's the first attempt to have it work on some load.
觀察他們的腳,你會發現這種葉狀結構叫做linalae, 並且有成千上萬的毛髮。 而且每根毛都分岔極為嚴重。 又分了成百上千個岔。 這就是秘密,因為這樣可以更為親密的接觸表面。 壁虎擁有10億個這樣200奈米大小的分岔。 它們不利用膠狀物,不用尼龍搭扣(魔術帶),也不用吸附力。 我們發現它們只用分子間引力作用。 所以在我們的藍圖上,我們將一些毛髮分岔。 這也為第一個具有自我清潔能力的膠提供了設計靈感—— 我們很開心的說我們也獲得了專利。 這裡是自然界中最簡單的版本。 這是我的同事羅恩•菲爾凌的嘗試 利用聚氨酯製造這種人工乾膠。 這是第一次試驗將其黏在同樣的表面上。
There's enormous interest in this in a variety of different fields. You could think of a thousand possible uses, I'm sure. Lots of people have, and we're excited about realizing this as a product. We have imagined products; for example, this one: we imagined a bio-inspired Band-Aid, where we took the glue off the Band-Aid. We took some hairs from a molting gecko; put three rolls of them on here, and then made this Band-Aid.
在很多領域裡,人們都對其非常感興趣。 我敢保證你能想出上千種用途。 很多人發現了這是一種產品,我們對此也很激動。 我們曾經想像過要製造這樣的產品,比如這個: 我們想像由生物啟發的護創貼布(ok蹦),可以不用黏膠。 我們在蛻皮的壁虎身上取得一些毛髮; 將三卷毛髮用在此處,製造出新的護創貼布(ok蹦)。
This is an undergraduate volunteer -- we have 30,000 undergraduates so we can choose among them -- that's actually just a red pen mark. But it makes an incredible Band-Aid. It's aerated, it can be peeled off easily, it doesn't cause any irritation, it works underwater. I think this is an extraordinary example of how curiosity-based research -- we just wondered how they climbed up something -- can lead to things that you could never imagine. It's just an example of why we need to support curiosity-based research. Here you are, pulling off the Band-Aid.
這是一位大學生志願者—— 我們有三萬個大學生,所以可以從他們之中挑選—— 這僅僅是個紅色筆印。 但這方法真的製造出了不可思議的護創貼布(ok蹦)。 充氣後,可以被輕易地揭掉,不會帶來小困擾,而且還具有防水功能。 我認為這是一個非常好的例子,來說明基於好奇的研究-—— 我們只是好奇它們如何爬上一些表面的—— 可以引領你發現一些想不到的事情。 這是一個例子來說明為什麼我們需要支持那些由好奇心啟發的研究。 現在你撕掉創可貼。
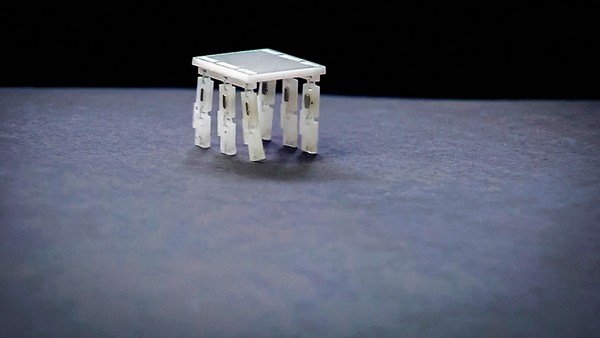
So we've redefined, now, what a foot is. The question is, can we use these secrets, then, to inspire the design of a better foot, better than one that we see in nature? Here's the new project: we're trying to create the first climbing search-and-rescue robot -- no suction or magnets -- that can only move on limited kinds of surfaces. I call the new robot RiSE, for "Robot in Scansorial Environment" -- that's a climbing environment -- and we have an extraordinary team of biologists and engineers creating this robot. And here is RiSE. It's six-legged and has a tail. Here it is on a fence and a tree. And here are RiSE's first steps on an incline. You have the audio? You can hear it go up. And here it is coming up at you, in its first steps up a wall. Now it's only using its simplest feet here, so this is very new. But we think we got the dynamics right of the robot.
所以現在我們對腳重新進行了定義。 問題是,我們可否用這些秘密 來啟發我們設計出比自然形成的更好的腳嗎? 這是一個新的項目: 我們試圖製造第一個可爬牆的搜索救援機器人——不用吸盤以及磁鐵—— 可以在特定的表面上移動。 我稱這個新機器人為高層,是“攀登環境機器人“的簡稱——它可以爬牆。 我們共同製造這個機器人的小組中有傑出的生物學家以及工程師。 這就是RiSE。 它有6條腿和一條尾巴。這是它在一個籬笆上,還有在一顆樹上。 這是RiSE在傾斜的表面走出的第一步。 你們有耳機吧?可以聽到它往上走。 它在向你走來,第一次爬牆。 這裡它僅僅用最簡單的腳,所以很新。 但是我想我們已經理解了這個機器人的動力裝置。
Mark Cutkosky, though, is taking it a step further. He's the one able to build this shape-deposition manufactured feet and toes. The next step is to make compliant toes, and try to add spines and claws and set it for dry adhesives. So the idea is to first get the toes and a foot right, attempt to make that climb, and ultimately put it on the robot. And that's exactly what he's done. He's built, in fact, a climbing foot-bot inspired by nature.
馬克•庫特科斯基將這個實驗更進一步。 他可以利用形狀沉積製造的技術來製造這些腳以及趾頭。 下一步是要製造順從聽話的腳趾頭。 然後加上刺和爪子,再加上乾膠。 我們計劃首先將腳趾和腳做好, 然後試圖讓腳能在牆上爬行,最後在其上面安裝機器人。 他就是這麼做的。 事實上,他製造出一個受自然啟發的腳踏式爬牆機器人。
And here's Cutkosky's and his amazing students' design. So these are tuned toes -- there are six of them, and they use the principles that I just talked about collectively for the blueprint. So this is not using any suction, any glue, and it will ultimately, when it's attached to the robot -- it's as biologically inspired as the animal -- hopefully be able to climb any kind of a surface. Here you see it, next, going up the side of a building at Stanford. It's sped up -- again, it's a foot climbing. It's not the whole robot yet, we're working on it -- now you can see how it's attaching. These tuned structures allow the spines, friction pads and ultimately the adhesive hairs to grab onto very challenging, difficult surfaces. And so they were able to get this thing -- this is now sped up 20 times -- can you imagine it trying to go up and rescue somebody at that upper floor? OK? You can visualize this now; it's not impossible. It's a very challenging task. But more to come later.
這就是特科斯基以及他令人佩服的學生的設計作品。 這些就是調諧的腳趾——有6個, 它們就將我剛才在藍圖上用到的原理綜合起來。 沒有用到吸盤,或任何膠狀物, 最終,當它被裝到機器人身上後—— 由動物啟發而來—— 希望能在任何表面上爬行。 現在你看,接下來,它爬上斯坦福大學建築的一面牆。 它加速了——它一直是用腳爬行。 這還不是全部的機器人,我們仍在繼續努力—— 現在你可以看到它是怎麼爬上去的。 這些調諧的結構使得所有刺、摩擦墊以及最終用來附著的毛髮 可以抓附住這些非常具有挑戰性的表面 所以它們現在可以爬牆了——這個影片加速了20倍—— 你能想像它爬上去救在上層的人嗎? 你完全可以這麼設想了,不是不可能。 這是一項非常具有挑戰性的工作。但我們還有很多要做。
To finish: we've gotten design secrets from nature by looking at how feet are built. We've learned we should distribute control to smart parts. Don't put it all in the brain, but put some of the control in tuned feet, legs and even body. That nature uses hybrid solutions, not a single solution, to these problems, and they're integrated and beautifully robust. And third, we believe strongly that we do not want to mimic nature but instead be inspired by biology, and use these novel principles with the best engineering solutions that are out there to make -- potentially -- something better than nature.
結束之際,當我們觀察腳是的構造時,我們汲取了自然界中設計的奧秘。 我們學到應該把控制力巧妙的分部。 不是全部放在腦子裡, 而是去琢磨琢磨調諧的足、腿甚至身體。 自然界為解決這類問題都使用多種途徑,絕不是單一途徑, 這些途徑都完美的結合在一起,而且十分有效。 第三,我們堅定的相信我們不要單純模仿自然,而是要從生物中汲取靈感, 然後利用這些新的原理以及最好的工程解決方案 來製造——有可能——比自然更好的東西。
So there's a clear message: whether you care about a fundamental, basic research of really interesting, bizarre, wonderful animals, or you want to build a search-and-rescue robot that can help you in an earthquake, or to save someone in a fire, or you care about medicine, we must preserve nature's designs. Otherwise these secrets will be lost forever. Thank you.
所以信息明確: 不論你在意的是基礎研究 關於那些有趣、奇怪而奇妙的動物, 或者你想製造一個可以用來搜尋及營救的機器人 來幫助你在地震或火災中救人 再或你對醫藥感興趣,總之我們必須保留大自然的設計。 否則這些秘密就將永遠丟失了。 謝謝。