I want you to imagine that you're a student in my lab. What I want you to do is to create a biologically inspired design. And so here's the challenge: I want you to help me create a fully 3D, dynamic, parameterized contact model. The translation of that is, could you help me build a foot? And it is a true challenge, and I do want you to help me. Of course, in the challenge there is a prize. It's not quite the TED Prize, but it is an exclusive t-shirt from our lab. So please send me your ideas about how to design a foot.
Tôi muốn các bạn tưởng tượng rằng các bạn là sinh viên trong phòng thí nghiệm của tôi. Yêu cầu của tôi là: hãy thiết kế một thứ lấy cảm hứng từ sinh học. Đề bài là thế này: Hãy tạo ra 1 mô hình tiếp xúc có tất cả dạng 3D, cơ động, có tham số hoá. (Tiếng cười) Nói đơn giản hơn, các bạn có thể giúp tôi tạo ra một “bàn chân” không? Đây là một thử thách thực sự, và tôi cần các bạn giúp. Tất nhiên, thử thách này có thưởng. Không hẳn là giải thưởng của TED, mà là một chiếc áo phông độc quyền từ phòng thí nghiệm của chúng tôi. Nên xin hãy gửi tôi ý tưởng của các bạn về cách thiết kế một bàn chân.
Now if we want to design a foot, what do we have to do? We have to first know what a foot is. If we go to the dictionary, it says, "It's the lower extremity of a leg that is in direct contact with the ground in standing or walking" That's the traditional definition. But if you wanted to really do research, what do you have to do? You have to go to the literature and look up what's known about feet. So you go to the literature. (Laughter)
Rồi, nếu ta muốn thiết kế một bàn chân, ta cần làm những gì? Trước hết ta phải biết “bàn chân” là thứ gì. Theo từ điển thì, “Nó là bộ phận dưới cùng của chân mà sẽ tiếp xúc trực tiếp với mặt đất khi ta đứng hoặc đi” Đó là định nghĩa truyền thống. Nhưng nếu muốn thật sự nghiên cứu nó, bạn cần làm gì? Bạn phải tìm tài liệu để xem đã có những kiến thức gì về bàn chân. Thế là bạn đi tìm tài liệu. (Tiếng cười)
Maybe you're familiar with this literature. The problem is, there are many, many feet. How do you do this? You need to survey all feet and extract the principles of how they work. And I want you to help me do that in this next clip. As you see this clip, look for principles, and also think about experiments that you might design in order to understand how a foot works.
Có lẽ bạn quen thuộc với loại tài liệu này. Vấn đề là, có rất nhiều, rất nhiều bàn chân. (Tiếng cười) Làm sao bây giờ? Bạn cần phải khảo sát tất cả các bàn chân và tìm ra nguyên lý hoạt động của chúng. Hãy giúp tôi làm điều đó trong đoạn phim tiếp theo đây. Trong khi xem, hãy tìm các nguyên lý, đồng thời nghĩ về những thí nghiệm mà bạn sẽ sắp xếp để hiểu được cách bàn chân hoạt động.
See any common themes? Principles? What would you do? What experiments would you run? Wow. (Applause) Our research on the biomechanics of animal locomotion has allowed us to make a blueprint for a foot. It's a design inspired by nature, but it's not a copy of any specific foot you just looked at, but it's a synthesis of the secrets of many, many feet.
Nhìn thấy gì tương đồng chưa? Hay là nguyên lý gì đó? Bạn sẽ làm gì? Bạn sẽ làm những thí nghiệm gì? Ồ. (Tiếng vỗ tay) Nghiên cứu của bọn tôi về cơ sinh học trong sự di chuyển của động vật đã giúp bọn tôi tạo ra bản thiết kế một bàn chân. Đó là một thiết kế lấy cảm hứng từ thiên nhiên, nhưng không phải bản sao của bất cứ bàn chân nào bạn vừa thấy, mà đó là sự tổng hợp từ những bí quyết của rất, rất nhiều bàn chân.
Now it turns out that animals can go anywhere. They can locomote on substrates that vary as you saw -- in the probability of contact, the movement of that surface and the type of footholds that are present. If you want to study how a foot works, we're going to have to simulate those surfaces, or simulate that debris. When we did that, here's a new experiment that we did: we put an animal and had it run -- this grass spider -- on a surface with 99 percent of the contact area removed. But it didn't even slow down the animal. It's still running at the human equivalent of 300 miles per hour.
Hoá ra động vật có thể đi đến bất cứ đâu. Chúng có thể di chuyển trên các bề mặt đa dạng như bạn thấy -- về phần trăm tiếp xúc, chuyển động của bề mặt đó, và các kiểu đặt chân hiện có. Nếu bạn muốn tìm hiểu cách hoạt động của bàn chân, ta sẽ cần mô phỏng những bề mặt đó, hoặc mô phỏng những mảnh vụn đó. Nếu vậy, đây là thí nghiệm mới mà bọn tôi đã làm: bọn tôi cho con nhện cỏ này chạy trên một bề mặt với 99% diện tích tiếp xúc đã bị loại bỏ. Nhưng vẫn không khiến con nhện này chậm lại. Nó vẫn chạy với vận tốc tương đương 1 con người chạy 300 dặm/giờ.
Now how could it do that? Well, look more carefully. When we slow it down 50 times we see how the leg is hitting that simulated debris. The leg is acting as a foot. And in fact, the animal contacts other parts of its leg more frequently than the traditionally defined foot. The foot is distributed along the whole leg. You can do another experiment where you can take a cockroach with a foot, and you can remove its foot. I'm passing some cockroaches around. Take a look at their feet. Without a foot, here's what it does. It doesn't even slow down. It can run the same speed without even that segment. No problem for the cockroach -- they can grow them back, if you care. How do they do it? Look carefully: this is slowed down 100 times, and watch what it's doing with the rest of its leg. It's acting, again, as a distributed foot -- very effective.
Sao nó làm được thế? Hãy nhìn kĩ này. Khi tua chậm 50 lần, ta thấy cẳng chân nó chạm vào các mảnh vụn mô phỏng kia. Cẳng chân hoạt động như bàn chân. Và thực ra, con nhện này tiếp xúc bằng các phần khác của cẳng chân nó thường xuyên hơn thứ vốn được định nghĩa là bàn chân. “Bàn chân” bấy giờ phân tán ra toàn bộ cẳng chân. Bạn có thể làm thí nghiệm khác, lấy một con gián vốn có bàn chân, và cắt mất bàn chân của nó. Tôi có chuyền vài con gián quanh phòng cho mọi người xem. Hãy nhìn bàn chân chúng. (Tiếng cười) Không có bàn chân, nó làm thế này. Thậm chí còn không chậm lại. Nó có thể chạy tốc độ y hệt mà không cần bộ phận đó. Con gián không sao đâu - chúng mọc lại chân được, nếu bạn băn khoăn. Làm sao chúng làm được? Nhìn kĩ nhé: đây là tua chậm 100 lần, xem nó làm gì với phần còn lại của cẳng chân kìa. Một lần nữa, cẳng chân trở thành một “bàn chân phân tán” -- rất hiệu quả.
Now, the question we had is, how general is a distributed foot?
Bây giờ, câu hỏi của ta là,
And the next behavior I'll show you of this animal just stunned us the first time that we saw it. Journalists, this is off the record; it's embargoed. Take a look at what that is! That's a bipedal octopus that's disguised as a rolling coconut. It was discovered by Christina Huffard and filmed by Sea Studios, right here from Monterey.
“bàn chân phân tán” có xuất hiện ở nhiều loài hay không? Tiếp theo tôi sẽ cho bạn thấy loài vật này đã làm bọn tôi sửng sốt lần đầu tiên thấy nó. Các vị nhà báo, đừng công bố cái này; có lệnh cấm đấy. Nhìn xem nó là cái gì kìa! Đó là một con bạch tuộc 2 chân, nguỵ trang thành một quả dừa đang lăn. (Cười lớn) Nó được khám phá bởi Christina Huffard và quay phim bởi Sea Studios, ở ngay Monterey đây.
We've also described another species of bipedal octopus. This one disguises itself as floating algae. It walks on two legs and it holds the other arms up in the air so that it can't be seen. (Applause) And look what it does with its foot to get over challenging terrain. It uses that beautiful distributed foot to make it as if those obstacles are not even there -- truly extraordinary.
Chúng tôi cũng đã miêu tả một giống bạch tuộc 2 chân khác. Giống này thì nguỵ trang thành tảo nổi. Nó đi trên 2 chân và giữ các chi khác trên không để không bị nhìn thấy. (Tiếng vỗ tay) Và hãy xem nó làm gì với bàn chân nó để đi qua địa hình hiểm trở. Nó dùng “bàn chân phân tán” xinh đẹp kia để tạo cảm giác các chướng ngại vật đó thậm chí còn không tồn tại -- thật sự rất phi thường.
In 1951, Escher made this drawing. He thought he created an animal fantasy.
Năm 1951, Escher vẽ ra cái này.
But we know that art imitates life, and it turns out nature, three million years ago, evolved the next animal. It's a shrimp-like animal called the stomatopod, and here's how it moves on the beaches of Panama: it actually rolls, and it can even roll uphill. It's the ultimate distributed foot: its whole body in this case is acting like its foot.
Ông đã nghĩ mình tạo ra một sinh vật ảo tưởng. Nhưng ta biết nghệ thuật bắt chước cuộc sống, và hoá ra thiên nhiên, từ 3 triệu năm trước, đã tiến hoá ra loài vật tiếp theo. Một loài giống với tôm, gọi là tôm tít, và đây là cách chúng di chuyển trên các bãi biển của Panama: chúng thực sự lăn, thậm chí còn lăn được lên dốc. Đó là “bàn chân phân tán” tân tiến nhất, trong trường hợp này, cả cơ thể chúng hoạt động như một bàn chân.
So, if we want to then, to our blueprint, add the first important feature,
Vậy, nếu muốn thêm vào bản thiết kế của mình
we want to add distributed foot contact. Not just with the traditional foot, but also the leg, and even of the body. Can this help us inspire the design of novel robots? We biologically inspired this robot, named RHex, built by these extraordinary engineers over the last few years. RHex's foot started off to be quite simple, then it got tuned over time, and ultimately resulted in this half circle. Why is that? The video will show you. Watch where the robot, now, contacts its leg in order to deal with this very difficult terrain. What you'll see, in fact, is that it's using that half circle leg as a distributed foot. Watch it go over this. You can see it here well on this debris. Extraordinary. No sensing, all the control is built right into the tuned legs. Really simple, but beautiful.
tính năng quan trọng này, bọn tôi nên thêm sự tiếp xúc của bàn chân phân tán. Không chỉ với bàn chân truyền thống, mà với cả cẳng chân, và thậm chí là cả cơ thể. Điều này có thể cho ta cảm hứng khi thiết kế các mẫu rô-bốt mới không? Bọn tôi truyền cảm hứng sinh học cho con rô-bốt này, tên RHex, tạo ra bởi các kĩ sư phi thường trong vài năm qua. Bàn chân của RHex ban đầu trông khá đơn giản, sau đó được điều chỉnh theo thời gian, và cuối cùng có dạng nửa vòng tròn thế này. Vì sao vậy? Đoạn phim này sẽ cho mọi người thấy. Hãy xem, lần này chân rô-bốt tiếp xúc ở đâu để ứng phó với địa hình cực khó này. Các bạn sẽ thấy, thực ra, nó đang dùng cả cẳng chân hình nửa vòng tròn làm bàn chân phân tán. Xem nó vượt qua chỗ này này. Các bạn có thể thấy rõ trên đống đổ nát này. Thật phi thường. Không cần cảm ứng, tất cả sự kiểm soát đều tích hợp vào những chiếc chân đã được căn chỉnh. Rất đơn giản, nhưng tuyệt đẹp.
Now, you might have noticed something else about the animals when they were running over the rough terrain. And my assistant's going to help me here. When you touched the cockroach leg -- can you get the microphone for him? When you touched the cockroach leg, what did it feel like? Did you notice something?
Giờ, các bạn có lẽ đã phát hiện cái gì đó khác về các loài vật này khi chúng chạy qua địa hình hiểm trở. Và trợ lý của tôi sẽ giúp tôi cái này. Khi cậu chạm vào chân gián -- anh lấy cái micro cho cậu bé giúp tôi với? Khi cậu chạm vào chân con gián, có cảm giác thế nào? Cậu có phát hiện cái gì không?
Boy: Spiny.
Cậu bé: Có rất nhiều gai ạ.
Robert Full: It's spiny, right? It's really spiny, isn't it? It sort of hurts. Maybe we could give it to our curator and see if he'd be brave enough to touch the cockroach. (Laughter)
Robert Full: Nhiều gai lắm, nhỉ? Thật sự rất nhiều gai đúng không? Có hơi đau tay. Có lẽ chúng ta nên đưa nó cho người phụ trách và xem xem cậu ấy có dám chạm vào con gián không. (Tiếng cười)
Chris Anderson: Did you touch it?
Chris Anderson: Cậu chạm vào nó rồi à?
RF: So if you look carefully at this, what you see is that they have spines and until a few weeks ago, no one knew what they did. They assumed that they were for protection and for sensory structures. We found that they're for something else -- here's a segment of that spine. They're tuned such that they easily collapse in one direction to pull the leg out from debris, but they're stiff in the other direction so they capture disparities in the surface.
RF: Nếu nhìn kĩ vào đây, các bạn sẽ thấy chúng có gai và cho đến vài tuần trước, không ai biết gai này để làm gì. Người ta giả định rằng gai này có chức năng bảo vệ và cảm quan Bọn tôi tìm ra rằng chúng là cho việc khác -- đây là một đoạn gai. Chúng được điều chỉnh sao cho dễ dàng xẹp về một phía để kéo cẳng chân ra khỏi các mảnh vụn, nhưng lại cứng nếu nghiêng về phía khác để bắt giữ sự lồi lõm của bề mặt dưới chân.
Now crabs don't miss footholds, because they normally move on sand -- until they come to our lab. And where they have a problem with this kind of mesh, because they don't have spines. The crabs are missing spines, so they have a problem in this kind of rough terrain. But of course, we can deal with that because we can produce artificial spines. We can make spines that catch on simulated debris and collapse on removal to easily pull them out. We did that by putting these artificial spines on crabs, as you see here, and then we tested them. Do we really understand that principle of tuning? The answer is, yes! This is slowed down 20-fold, and the crab just zooms across that simulated debris. (Laughter) (Applause) A little better than nature.
Còn cua thì không bị lọt chân, vì chúng thường di chuyển trên cát -- cho đến khi tới phòng thí nghiệm của bọn tôi. Cũng là nơi chúng gặp vấn đề với loại lưới này, vì chúng không có gai. Mấy con cua này thiếu gai, nên chúng gặp khó khăn với kiểu địa hình khó nhằn này. Nhưng tất nhiên, ta có thể đối phó với cái đấy vì ta sản xuất được gai nhân tạo. Ta có thể tạo ra loại gai mà sẽ bám chặt những mảnh vụn mô phỏng và xẹp xuống khi rút ra để dễ dàng kéo chúng ra. Bọn tôi làm điều đó bằng cách gắn gai nhân tạo lên mấy con cua, như các bạn thấy ở đây, rồi bọn tôi thử nghiệm chúng, Bọn tôi có thực sự hiểu nguyên lý để căn chỉnh nó không? Câu trả lời là, có! Đây là tua chậm 20 lần, và con cua cứ thế vụt qua các mảnh vụn mô phỏng đó thôi. (Tiếng cười) (Tiếng vỗ tay) Tốt hơn một chút so với tự nhiên.
So to our blueprint, we need to add tuned spines. Now will this help us think about the design of more effective climbing robots? Well, here's RHex: RHex has trouble on rails -- on smooth rails, as you see here. So why not add a spine? My colleagues did this at U. Penn. Dan Koditschek put some steel nails -- very simple version -- on the robot, and here's RHex, now, going over those steel -- those rails. No problem! How does it do it? Let's slow it down and you can see the spines in action. Watch the leg come around, and you'll see it grab on right there. It couldn't do that before; it would just slip and get stuck and tip over. And watch again, right there -- successful.
Vậy, cần thêm “gai đã điều chỉnh” vào bản thiết kế này. Vậy nó có giúp ta nghĩ về việc thiết kế một con rô-bốt leo trèo hiệu quả hơn không? Ừm, đây là RHex: RHex gặp khó khăn khi leo thang -- những bậc thang trơn nhẵn, như các bạn thấy ở đây. Vậy tại sao không thêm gai vào? Đồng nghiệp của tôi đã làm thế ở Đại học Pennsylvania. Dan Koditschek đã gắn gai thép -- phiên bản rất đơn giản -- lên con rô-bốt, và đây là RHex, giờ đã có thể đi qua những bậc thang kia. Vậy câu hỏi là, sao nó làm được thế? Tua chậm lại, các bạn sẽ thấy tác dụng của gai. Nhìn cái chân xoay vòng, bạn sẽ thấy nó bám vào ngay đó. Trước đó nó không làm được vậy; nó sẽ chỉ trượt và mắc kẹt rồi bật ngửa. Xem lại này, ngay đó --
Now just because we have a distributed foot and spines
thành công.
doesn't mean you can climb vertical surfaces. This is really, really difficult. But look at this animal do it! One of the ones I'm passing around is climbing up this vertical surface that's a smooth metal plate. It's extraordinary how fast it can do it -- but if you slow it down, you see something that's quite extraordinary. It's a secret. The animal effectively climbs by slipping and look -- and doing, actually, terribly, with respect to grabbing on the surface. It looks, in fact, like it's swimming up the surface. We can actually model that behavior better as a fluid, if you look at it. The distributed foot, actually, is working more like a paddle.
Giờ, chỉ vì ta có bàn chân phân tán và cấu trúc gai không có nghĩa là ta có thể trèo lên bề mặt thẳng đứng. Việc đó thật sự rất, rất khó. Nhưng xem con vật này làm được này! Một trong mấy con mà tôi đang chuyền xung quanh trèo được lên bề mặt thẳng đứng vốn là một tấm kim loại trơn nhẵn này. Thật phi thường khi nó có thể trèo nhanh đến thế -- nhưng nếu tua chậm, bạn sẽ thấy một thứ rất độc đáo. Đó là bí quyết. Con vật này leo trèo hiệu quả như vậy bằng cách trượt chân và nhìn kìa -- bằng cách dở tệ trong việc bám vào bề mặt dưới chân nó. Thực ra, trông nó như đang bơi lên bề mặt đó vậy. Ta có thể mô phỏng hành vi này tốt hơn bằng chất lỏng, nếu các bạn phân tích thử. Bàn chân phân tán, thật ra đang hoạt động như một mái chèo.
The same is true when we looked at this lizard running on fluidized sand. Watch its feet. It's actually functioning as a paddle even though it's interacting with a surface that we normally think of as a solid. This is not different from what my former undergraduate discovered when she figured out how lizards can run on water itself. Can you use this to make a better robot? Martin Buehler did -- who's now at Boston Dynamics -- he took this idea and made RHex to be Aqua RHex. So here's RHex with paddles, now converted into an incredibly maneuverable swimming robot.
Điều đó vẫn đúng khi ta nhìn con thằn lằn đang chạy trên cát hoá lỏng này. Hãy quan sát bàn chân nó. Bàn chân nó có tác dụng như mái chèo mặc dù nó đang tiếp xúc với một bề mặt mà ta thường cho rằng là chất rắn. Điều này không khác với những gì mà cựu sinh viên của tôi phát hiện khi cô ấy biết được cách mà thằn lằn có thể tự chạy trên mặt nước. Các bạn có thể dùng kiến thức này để làm một con rô-bốt tốt hơn không? Martin Buehler - người giờ đang ở Boston Dynamics - làm được, cậu ấy lấy ý tưởng này và từ RHex, tạo ra Aqua RHex. <i>(Aqua = nước)</i> Đây là RHex có mái chèo, giờ đã trở thành con rô-bốt biết bơi cực kì linh hoạt.
For rough surfaces, though, animals add claws. And you probably feel them if you grabbed it. Did you touch it?
Tuy nhiên, với các bề mặt gồ ghề, động vật cần thêm móng vuốt. Các bạn sẽ cảm nhận được khi cầm nó. Cậu chạm vào chưa? CA: Rồi.
CA: I did.
RF: Và chúng rất giỏi trong việc bám vào các bề mặt này với vuốt của chúng.
RF: And they do really well at grabbing onto surfaces with these claws. Mark Cutkosky at Stanford University, one of my collaborators, is an extraordinary engineer who developed this technique called Shape Deposition Manufacturing, where he can imbed claws right into an artificial foot. And here's the simple version of a foot for a new robot that I'll show you in a bit. So to our blueprint, let's attach claws. Now if we look at animals, though, to be really maneuverable in all surfaces, the animals use hybrid mechanisms that include claws, and spines, and hairs, and pads, and glue, and capillary adhesion and a whole bunch of other things. These are all from different insects. There's an ant crawling up a vertical surface. Let's look at that ant.
Mark Cutkosky ở Đại học Stanford, một trong những cộng tác viên của tôi, là một kĩ sư phi thường người đã phát triển công nghệ in 3D theo dạng bồi đắp, từ đó cậu ấy có thể “nhúng” các móng vuốt vào bàn chân nhân tạo trong quá trình in 3D. Đây là phiên bản đơn giản của bàn chân 1 con rô-bốt mới mà lát nữa tôi sẽ cho bạn thấy. Vậy thì, cho bản thiết kế của bọn tôi, gắn thêm “móng vuốt” vào. Tuy nhiên, nếu ta quan sát các loài động vật, để thật sự linh hoạt trên tất cả các bề mặt, chúng dùng nhiều cơ chế kết hợp bao gồm móng vuốt, gai, lông, đệm lót, keo, kết dính nhờ mao dẫn và một mớ những thứ khác. Những thứ này là từ nhiều loài côn trùng khác nhau. 1 con kiến bò lên bề mặt thẳng đứng. Hãy nhìn con kiến đó nào.
This is the foot of an ant. You see the hairs and the claws and this thing here. This is when its foot's in the air. Watch what happens when the foot goes onto your sandwich. You see what happens? That pad comes out. And that's where the glue is. Here from underneath is an ant foot, and when the claws don't dig in, that pad automatically comes out without the ant doing anything. It just extrudes. And this was a hard shot to get -- I think this is the shot of the ant foot on the superstrings. So it's pretty tough to do. This is what it looks like close up -- here's the ant foot, and there's the glue.
Đây là bàn chân một con kiến. Bạn thấy lông và vuốt và thứ này ở đây. Đây là khi bàn chân nó ở trên không. Xem chuyện gì xảy ra khi bàn chân nó bước lên cái bánh mì kẹp của bạn. (Tiếng cười) Các bạn thấy gì xảy ra không? Miếng đệm lót đó nhô ra ngoài. Và đó chính là chỗ có chất keo. Đây là góc nhìn từ dưới lên của bàn chân kiến. khi móng vuốt không vùi sâu vào, miếng đệm lót đó tự động nhô ra mà không cần con kiến làm gì cả. Nó cứ thế ló ra thôi. Và cảnh này khó lắm mới quay được -- tôi nghĩ đây là cảnh bàn chân kiến trên siêu dây. Nên khá khó để thực hiện đấy. Đây là khi quay cận cảnh -- đây là bàn chân con kiến, và kia là chất keo.
And we discovered this glue may be an interesting two-phase mixture. It certainly helps it to hold on. So to our blueprint, we stick on some sticky pads. Now you might think for smooth surfaces we get inspiration here. Now we have something better here. The gecko's a really great example of nanotechnology in nature. These are its feet. They're -- almost look alien. And the secret, which they stick on with, involves their hairy toes. They can run up a surface at a meter per second, take 30 steps in that one second -- you can hardly see them. If we slow it down, they attach their feet at eight milliseconds, and detach them in 16 milliseconds. And when you watch how they detach it, it is bizarre. They peel away from the surface like you'd peel away a piece of tape. Very strange. How do they stick?
Và bọn tôi phát hiện chất keo này có thể là một hỗn hợp 2-pha thú vị. Chắc chắn là để giúp con kiến bám chặt. Vậy thì, hãy thêm “đệm lót có keo dính” vào bản thiết kế này. Các bạn có lẽ đã nghĩ, cho các bề mặt trơn nhẵn, bọn tôi lấy cảm hứng từ đây. Không, bọn tôi có thứ còn tốt hơn. Đây. (Tiếng cười) Thằn lằn là ví dụ tuyệt vời của công nghệ nano trong tự nhiên. Đây là bàn chân của chúng. Chúng -- trông cứ như sinh vật ngoài hành tinh. Và bí quyết của việc dính chặt như vậy, nằm ở những ngón chân lông lá của chúng. (Tiếng cười) Chúng có thể chạy lên bề mặt thẳng đứng với tốc độ 1 mét/giây, là 30 bước trong 1 giây đó -- bạn khó mà nhìn thấy chúng. Tua chậm lại, chúng hạ chân trong 8 mili giây, và nhấc chân trong 16 mili giây. Và nếu ta quan sát cách chúng nhấc chân, nó rất kì lạ. Chúng tách khỏi bề mặt hệt như cách mà bạn gỡ băng keo vậy. (Tiếng cười)
If you look at their feet, they have leaf-like structures called linalae with millions of hairs. And each hair has the worst case of split ends possible. It has a hundred to a thousand split ends, and that's the secret, because it allows intimate contact. The gecko has a billion of these 200-nanometer-sized split ends. And they don't stick by glue, or they don't work like Velcro, or they don't work with suction. We discovered they work by intermolecular forces alone. So to our blueprint, we split some hairs. This has inspired the design of the first self-cleaning dry adhesive -- the patent issued, we're happy to say. And here's the simplest version in nature, and here's my collaborator Ron Fearing's attempt at an artificial version of this dry adhesive made from polyurethane. And here's the first attempt to have it work on some load.
Lạ thật. Làm sao chúng dính thế được? Hãy nhìn bàn chân chúng, chúng có cấu trúc giống lá, gọi là linalae với hàng triệu sợi lông. Mỗi sợi là một ca bị chẻ ngọn tệ hết mức có thể. Nó có hàng trăm đến hàng nghìn nhánh bị chẻ, và đó là bí quyết, vì như vậy sẽ cho phép tiếp xúc thân mật. Thằn lằn có cả tỉ nhánh bị chẻ kích cỡ 200 nanômét thế này. Và chúng không dính bằng keo, hoặc băng dính gai, hoặc bằng giác hút. Bọn tôi phát hiện chúng dính chỉ nhờ vào lực tương tác giữa các phân tử. Thế thì, trong bản thiết kế, bọn tôi chẻ ngọn mấy sợi lông. (Tiếng cười) Thứ này đã truyền cảm hứng cho chất dính khô tự làm sạch đầu tiên -- bằng sáng chế được công bố, bọn tôi rất vui khi nói vậy. Và đây là phiên bản đơn giản nhất trong tự nhiên, đây là cộng tác viên của tôi Ron Fearing, đang thử nghiệm làm ra phiên bản nhân tạo của chất dính khô này từ polyurethane. Và đây là lần thử nghiệm đầu tiên:
There's enormous interest in this in a variety of different fields. You could think of a thousand possible uses, I'm sure. Lots of people have, and we're excited about realizing this as a product. We have imagined products; for example, this one: we imagined a bio-inspired Band-Aid, where we took the glue off the Band-Aid. We took some hairs from a molting gecko; put three rolls of them on here, and then made this Band-Aid.
cho nó nâng một số thứ. Thứ này rất được quan tâm trong nhiều lĩnh vực khác nhau. Tôi cam đoan các bạn có thể nghĩ ra hàng ngàn công dụng của nó. Nhiều người đã thử, còn bọn tôi thì háo hức về việc biến nó thành một sản phẩm thực tiễn. Bọn tôi đã hình dung ra nhiều sản phẩm, ví dụ như cái này: băng cá nhân lấy cảm hứng từ sinh học, tức là băng cá nhân nhưng bị bọn tôi gỡ mất lớp keo. Bọn tôi lấy lông từ 1 con thằn lằn đang lột xác; gắn 3 dải lông lên đây, làm ra loại băng cá nhân này.
This is an undergraduate volunteer -- we have 30,000 undergraduates so we can choose among them -- that's actually just a red pen mark. But it makes an incredible Band-Aid. It's aerated, it can be peeled off easily, it doesn't cause any irritation, it works underwater. I think this is an extraordinary example of how curiosity-based research -- we just wondered how they climbed up something -- can lead to things that you could never imagine. It's just an example of why we need to support curiosity-based research. Here you are, pulling off the Band-Aid.
Đây là một sinh viên tình nguyện -- bọn tôi có 30 nghìn sinh viên, nên có thể chọn từ các bạn ấy -- (Tiếng cười) đó thật ra chỉ là dấu bút đỏ. Đây là loại băng cá nhân rất độc đáo. Nó thoáng khí, dễ gỡ ra, không gây kích ứng, vẫn hoạt động bình thường dưới nước. Tôi nghĩ đây là ví dụ rất đặc biệt của việc nghiên cứu dựa trên sự tò mò -- ta chỉ tò mò chúng leo lên kiểu gì -- có thể dẫn đến những thứ bạn không bao giờ ngờ tới. Đó chỉ là một ví dụ cho việc vì sao ta cần ủng hộ các nghiên cứu dựa trên sự tò mò. Đây, khi bạn gỡ loại băng cá nhân mới này ra.
So we've redefined, now, what a foot is. The question is, can we use these secrets, then, to inspire the design of a better foot, better than one that we see in nature? Here's the new project: we're trying to create the first climbing search-and-rescue robot -- no suction or magnets -- that can only move on limited kinds of surfaces. I call the new robot RiSE, for "Robot in Scansorial Environment" -- that's a climbing environment -- and we have an extraordinary team of biologists and engineers creating this robot. And here is RiSE. It's six-legged and has a tail. Here it is on a fence and a tree. And here are RiSE's first steps on an incline. You have the audio? You can hear it go up. And here it is coming up at you, in its first steps up a wall. Now it's only using its simplest feet here, so this is very new. But we think we got the dynamics right of the robot.
Vậy, ta vừa mới định nghĩa lại, bàn chân là cái gì. Câu hỏi là, liệu ta có thể dùng những bí quyết này, để có cảm hứng thiết kế ra bàn chân tốt hơn, tốt hơn cái mà ta thấy ngoài tự nhiên? Đây là một dự án mới: bọn tôi cố gắng tạo ra con rô-bốt tìm kiếm cứu hộ đầu tiên biết leo trèo -- không lực hút hay nam châm -- mà chỉ có thể di chuyển giới hạn trên một số bề mặt. Tôi gọi con rô-bốt mới RiSE, viết tắt của “Rô-bốt trong môi trường leo trèo” và bọn tôi có 1 đội đặc biệt toàn các nhà sinh học và kĩ sư làm ra con rô-bốt này. Và đây là RiSE. Nó có 6 chân và 1 cái đuôi. Đây là nó trên hàng rào và trên cây. Và đây là những bước đầu tiên của RiSE lên dốc. RF: Âm thanh ổn không? ?: Nghe được âm lượng đang tăng. Và đây là nó đi về phía các bạn, những bước đầu tiên lên một bức tường. Lúc này nó chỉ dùng bàn chân đơn giản nhất của nó, nên điều này rất mới lạ. Nhưng bọn tôi nghĩ, về mặt động lực học, bọn tôi đã thiết kế con rô-bốt đúng rồi.
Mark Cutkosky, though, is taking it a step further. He's the one able to build this shape-deposition manufactured feet and toes. The next step is to make compliant toes, and try to add spines and claws and set it for dry adhesives. So the idea is to first get the toes and a foot right, attempt to make that climb, and ultimately put it on the robot. And that's exactly what he's done. He's built, in fact, a climbing foot-bot inspired by nature.
Tuy nhiên, Mark Cutkosky còn muốn tiến thêm một bước xa hơn. Cậu ấy là người đã tạo ra bàn chân và ngón chân từ công nghệ in 3D bồi đắp. Bước tiếp theo là tạo ra ngón chân phù hợp. cố gắng thêm gai và vuốt và gắn chất dính khô lên. Ý tưởng là trước hết phải làm đúng ngón chân và bàn chân. thử nghiệm cho nó leo trèo, và cuối cùng gắn nó vào con rô-bốt. Và đó chính xác là những gì cậu ấy đã làm. Cậu ấy thật ra đã tạo nên một bàn chân rô-bốt biết leo trèo
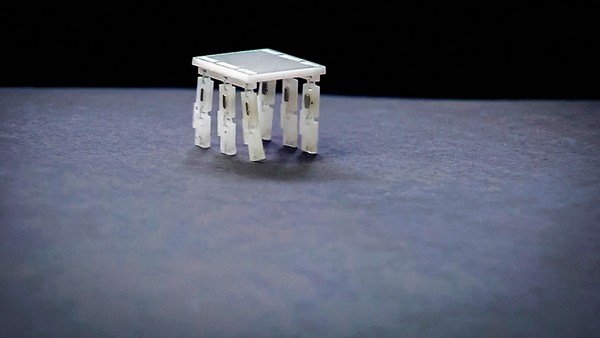
And here's Cutkosky's and his amazing students' design. So these are tuned toes -- there are six of them, and they use the principles that I just talked about collectively for the blueprint. So this is not using any suction, any glue, and it will ultimately, when it's attached to the robot -- it's as biologically inspired as the animal -- hopefully be able to climb any kind of a surface. Here you see it, next, going up the side of a building at Stanford. It's sped up -- again, it's a foot climbing. It's not the whole robot yet, we're working on it -- now you can see how it's attaching. These tuned structures allow the spines, friction pads and ultimately the adhesive hairs to grab onto very challenging, difficult surfaces. And so they were able to get this thing -- this is now sped up 20 times -- can you imagine it trying to go up and rescue somebody at that upper floor? OK? You can visualize this now; it's not impossible. It's a very challenging task. But more to come later.
lấy cảm hứng từ tự nhiên. Đây là thiết kế của Cutkosky và những học trò tuyệt vời của cậu ấy. Vậy đây là những ngón chân đã căn chỉnh -- có 6 ngón, và chúng dùng tất cả các nguyên lý mà tôi vừa nói trong bản thiết kế. (Tiếng cười) Thứ này không cần đến giác hút, keo dính, và cuối cùng, khi được gắn vào con rô-bốt -- cũng có tính chất tự nhiên như các loài vật -- hy vọng nó có thể leo lên bất cứ bề mặt nào. Các bạn thấy đó, tiếp theo, nó leo lên bức tường ở một bên toà nhà ở Standford. Nó tăng tốc -- nhắc lại, đây chỉ là bàn chân. Chưa phải rô-bốt hoàn chỉnh, bọn tôi vẫn đang làm cái đấy. Các bạn có thể thấy nó hạ chân thế nào. Cấu trúc căn chỉnh này giúp các gai, đệm ma sát, và cuối cùng là các lông dính có thể bám vào các bề mặt khó khăn, đầy thách thức. Thế nên chúng mới làm được việc này -- đây là tua nhanh 20 lần -- thử tưởng tượng xem, nó cố leo lên và giải cứu ai đó trên tầng lầu đó? Có thể hình dung ra ngay bây giờ đấy; không hề bất khả thi đâu. Đây là một nhiệm vụ rất khó. Nhưng nhiều hơn nữa để nói sau vậy.
To finish: we've gotten design secrets from nature by looking at how feet are built. We've learned we should distribute control to smart parts. Don't put it all in the brain, but put some of the control in tuned feet, legs and even body. That nature uses hybrid solutions, not a single solution, to these problems, and they're integrated and beautifully robust. And third, we believe strongly that we do not want to mimic nature but instead be inspired by biology, and use these novel principles with the best engineering solutions that are out there to make -- potentially -- something better than nature.
Tổng kết lại: ta đã tìm ra bí quyết từ tự nhiên bằng cách quan sát cấu tạo các bàn chân nhiều loài. Ta học được rằng ta nên chia sự kiểm soát ra nhiều phần. Đừng đổ hết lên não, mà hãy chia một ít cho bàn chân, cẳng chân và cả cơ thể, sau khi căn chỉnh. Rằng thiên nhiên có các giải pháp kết hợp, chứ không chỉ một giải pháp, cho các vấn đề này, chúng thống nhất và khoẻ khoắn đến tuyệt đẹp. Và điều thứ 3, chúng ta chắc chắn rằng ta không muốn bắt chước thiên nhiên mà thay vào đó, lấy cảm hứng từ sinh vật học và dùng các nguyên lý mới lạ này cùng những giải pháp kỹ thuật tốt nhất hiện có để tạo ra -- có lẽ vậy -- một thứ còn tốt hơn thiên nhiên.
So there's a clear message: whether you care about a fundamental, basic research of really interesting, bizarre, wonderful animals, or you want to build a search-and-rescue robot that can help you in an earthquake, or to save someone in a fire, or you care about medicine, we must preserve nature's designs. Otherwise these secrets will be lost forever. Thank you.
Vậy thì thông điệp đã rõ ràng: dù bạn quan tâm đến lĩnh vực nghiên cứu cơ sở, cơ bản của các loài vật thú vị, kì lạ, đáng thán phục, hay bạn muốn tạo ra rô-bốt tìm hiếm cứu hộ mà sẽ giúp bạn trong 1 trận động đất, hoặc cứu ai đó trong 1 vụ hoả hoạn, hay bạn quan tâm đến nền y học, chúng ta vẫn cần giữ gìn những thiết kế của thiên nhiên. Nếu không, những bí quyết này rồi sẽ bị đánh mất mãi mãi.