I want you to imagine that you're a student in my lab. What I want you to do is to create a biologically inspired design. And so here's the challenge: I want you to help me create a fully 3D, dynamic, parameterized contact model. The translation of that is, could you help me build a foot? And it is a true challenge, and I do want you to help me. Of course, in the challenge there is a prize. It's not quite the TED Prize, but it is an exclusive t-shirt from our lab. So please send me your ideas about how to design a foot.
Voglio che immaginiate di essere studenti del mio laboratorio. Cio che voglio è che creiate un modello ispirato alla biologia. Ecco i termini della sfida: voglio che mi aiutiate a creare un modello di contatto parametrizzato, 3D, dinamico. In altre parole "Potete aiutarmi a costruire un piede?" È una vera sfida e voglio che mi aiutiate. Naturalmente, ogni sfida prevede un premio. Non proprio il TED prize, ma comunque qualcosa di esclusivo: una T-shirt del nostro laboratorio. Fatemi conoscere le vostre idee, quindi.
Now if we want to design a foot, what do we have to do? We have to first know what a foot is. If we go to the dictionary, it says, "It's the lower extremity of a leg that is in direct contact with the ground in standing or walking" That's the traditional definition. But if you wanted to really do research, what do you have to do? You have to go to the literature and look up what's known about feet. So you go to the literature. (Laughter)
Se si vuole progettare un piede, cosa si deve fare? Prima di tutto, dobbiamo sapere cos'è un piede. Sul dizionario c'è scritto: "È l'estremità inferiore di una gamba, che entra in contatto col terreno quando si sta fermi o si cammina" È la definizione classica. Ma se voleste fare della vera ricerca, cosa dovreste fare? Dovreste consultare la letteratura e studiare quello che si sa sui piedi. Guardiamo la letteratura, allora. (Risate)
Maybe you're familiar with this literature. The problem is, there are many, many feet. How do you do this? You need to survey all feet and extract the principles of how they work. And I want you to help me do that in this next clip. As you see this clip, look for principles, and also think about experiments that you might design in order to understand how a foot works.
Magari siete già pratici di questa letteratura. Il problema è che ci sono tanti, tanti piedi. Come realizzate il vostro? Dovete osservare i tanti possibili piedi e astrarne i principi di funzionamento, e voglio che mi aiutiate a farlo, nella prossima clip. Man mano che la vedete, cercate di dedurne i principi, e pensate anche a quali esperimenti potreste mettere a punto per capire come funziona un piede.
See any common themes? Principles? What would you do? What experiments would you run? Wow. (Applause) Our research on the biomechanics of animal locomotion has allowed us to make a blueprint for a foot. It's a design inspired by nature, but it's not a copy of any specific foot you just looked at, but it's a synthesis of the secrets of many, many feet.
Non vedete alcun tema comune? Principi? Cosa fareste? Che esperimenti fareste? Wow. (Applausi) La nostra ricerca sulla biomeccanica della locomozione animale ci ha permesso di progettare un modello di piede. È un progetto ispirato alla Natura, ma non è la copia di qualche piede particolare, bensì una sintesi dei segreti di molti, molti piedi.
Now it turns out that animals can go anywhere. They can locomote on substrates that vary as you saw -- in the probability of contact, the movement of that surface and the type of footholds that are present. If you want to study how a foot works, we're going to have to simulate those surfaces, or simulate that debris. When we did that, here's a new experiment that we did: we put an animal and had it run -- this grass spider -- on a surface with 99 percent of the contact area removed. But it didn't even slow down the animal. It's still running at the human equivalent of 300 miles per hour.
Ora, sembra che gli animali possano andare ovunque. Possono muoversi su supporti che variano, come potete vedere, nella probabilità di contatto, nel movimento della superficie, e nella presa del piede sul terreno. Se volete studiare come funziona un piede dovrete simulare queste superfici, o questi reticoli. Quando l'abbiamo fatto, in un altro esperimento, abbiamo fatto correre un animale, questo ragno, sopra una superficie dove il 99% dell'area di contatto era stata rimossa. La cosa, tuttavia, nemmeno rallentò l'animale. Sta ancora correndo all'equivalente umano di 300 miglia all'ora.
Now how could it do that? Well, look more carefully. When we slow it down 50 times we see how the leg is hitting that simulated debris. The leg is acting as a foot. And in fact, the animal contacts other parts of its leg more frequently than the traditionally defined foot. The foot is distributed along the whole leg. You can do another experiment where you can take a cockroach with a foot, and you can remove its foot. I'm passing some cockroaches around. Take a look at their feet. Without a foot, here's what it does. It doesn't even slow down. It can run the same speed without even that segment. No problem for the cockroach -- they can grow them back, if you care. How do they do it? Look carefully: this is slowed down 100 times, and watch what it's doing with the rest of its leg. It's acting, again, as a distributed foot -- very effective.
Come può fare tutto questo? Beh, osservando con più cura, e rallentando 50 volte, notiamo come la zampa entri in contatto col reticolo. La zampa funge da piede. E in effetti, l'animale fa entrare in contatto le altre parti della zampa più spesso del piede tradizionalmente definito. Il piede è distribuito lungo tutta la zampa. Si può fare un altro esperimento: prendete una blatta e rimuovete il suo piede. Ne scorro un po' in rassegna. Date uno sguardo ai loro piedi. Questo è quello che fa senza un piede: nemmeno rallenta! Può correre alla stessa velocità anche senza quel segmento. Non è un problema per la blatta -- possono farlo ricrescere, se volete saperlo. Come ci riescono? Guardate con attenzione (questo è rallentato 100 volte) cosa sta facendo col resto della zampa. la zampa sta fungendo di nuovo da "piede distribuito". Molto efficace.
Now, the question we had is, how general is a distributed foot? And the next behavior I'll show you of this animal just stunned us the first time that we saw it. Journalists, this is off the record; it's embargoed. Take a look at what that is! That's a bipedal octopus that's disguised as a rolling coconut. It was discovered by Christina Huffard and filmed by Sea Studios, right here from Monterey.
La nostra domanda ora è: quanto è diffuso in Natura il piede distribuito? Ed il prossimo comportamento che vi mostrerò ci ha proprio sbalordito la prima volta che lo abbiamo visto. Giornalisti, questo è oltre il record, c'è l'embargo su questa roba. Osservate! Questo è un polpo bipede che si traveste da noce di cocco. Fu scoperto da Christina Huffard e filmato dai Sea Studios proprio qui a Monterey.
We've also described another species of bipedal octopus. This one disguises itself as floating algae. It walks on two legs and it holds the other arms up in the air so that it can't be seen. (Applause) And look what it does with its foot to get over challenging terrain. It uses that beautiful distributed foot to make it as if those obstacles are not even there -- truly extraordinary.
Abbiamo descritto anche un'altra specie di polpo bipede. Questo si mimetizza da alga galleggiante. Cammina su due zampe e mantiene le altre braccia in aria per non farsi notare. (Applausi) E guardate cosa fa col piede per spostarsi su un terreno così difficile. Usa questo bellissimo piede distribuito per farlo, come se questi ostacoli non ci fossero. Davvero straordinario.
In 1951, Escher made this drawing. He thought he created an animal fantasy. But we know that art imitates life, and it turns out nature, three million years ago, evolved the next animal. It's a shrimp-like animal called the stomatopod, and here's how it moves on the beaches of Panama: it actually rolls, and it can even roll uphill. It's the ultimate distributed foot: its whole body in this case is acting like its foot.
Nel 1951, Escher fece questo disegno. Pensava di aver creato una fantasticheria animale. Ma sappiamo che l'Arte imita la Natura, e risulta che la Natura, 3 milioni di anni fa, fece evolvere l'animale successivo, una specie di mollusco chiamato stomatopodo. Guardate come si muove sulle spiagge di Panama: si rotola, persino in salita. È il piede distribuito definitivo. Il suo intero corpo, in questo caso, sta fungendo da piede.
So, if we want to then, to our blueprint, add the first important feature, we want to add distributed foot contact. Not just with the traditional foot, but also the leg, and even of the body. Can this help us inspire the design of novel robots? We biologically inspired this robot, named RHex, built by these extraordinary engineers over the last few years. RHex's foot started off to be quite simple, then it got tuned over time, and ultimately resulted in this half circle. Why is that? The video will show you. Watch where the robot, now, contacts its leg in order to deal with this very difficult terrain. What you'll see, in fact, is that it's using that half circle leg as a distributed foot. Watch it go over this. You can see it here well on this debris. Extraordinary. No sensing, all the control is built right into the tuned legs. Really simple, but beautiful.
Quindi, se vogliamo aggiungere al nostro disegno la prima importante caratteristica, dobbiamo aggiungere il contatto distribuito del piede. Non solo con il piede tradizionale, ma anche con la zampa e persino col resto del corpo. Questo può aiutarci ad ispirare il design di un nuovo robot? Per creare questo robot, chiamato RHex, costruito da ingegneri straordinari, negli ultimi anni, ci siamo ispirati alla biologia. Il piede di RHex, all'inizio, era molto semplice, poi è stato messo a punto nel corso del tempo e alla fine è diventato questo semicerchio. Capirete dal filmato perché è fatto così. Guardate dove il robot, ora, mette la zampa per affrontare questo terreno molto difficile. Vedrete che sta usando quel semicerchio di zampa come "piede distribuito". Guardate come supera gli ostacoli. Come supera questi reticoli. Straordinario. Nessun sensore, tutto il controllo è costruito dentro le zampe regolate. Molto semplice, ma bello.
Now, you might have noticed something else about the animals when they were running over the rough terrain. And my assistant's going to help me here. When you touched the cockroach leg -- can you get the microphone for him? When you touched the cockroach leg, what did it feel like? Did you notice something?
Ora, potreste aver notato qualcos'altro sugli animali, quando correvano oltre il terreno sconnesso. Adesso il mio assistente mi aiuterà. Quando hai toccato la zampa della blatta -- possiamo dargli un microfono? Quando hai toccato la zampa della blatta, che sensazione dava? Non hai notato nulla?
Boy: Spiny.
(Ragazzo:) "È aculeata"
Robert Full: It's spiny, right? It's really spiny, isn't it? It sort of hurts. Maybe we could give it to our curator and see if he'd be brave enough to touch the cockroach. (Laughter)
Robert Full: È proprio aculeata giusto? Fa quasi male. Potremmo provare a darla al vostro curatore e vedere se è abbastanza coraggioso da toccarla. (Risate)
Chris Anderson: Did you touch it?
(Chirs Anderson) "L'hai toccata?"
RF: So if you look carefully at this, what you see is that they have spines and until a few weeks ago, no one knew what they did. They assumed that they were for protection and for sensory structures. We found that they're for something else -- here's a segment of that spine. They're tuned such that they easily collapse in one direction to pull the leg out from debris, but they're stiff in the other direction so they capture disparities in the surface.
Robert Full: Osservando con cura, dunque, si notano gli aculei. Fino a qualche settimana fa, nessuno sapeva cosa facessero. Si pensava fossero strutture sensorie e di protezione. Ma abbiamo scoperto che servono anche ad altro -- ecco un segmento di quell'aculeo. Sono messe a punto in modo da ripiegarsi facilmente in una data direzione (sollevando così la zampa dai reticoli), ma restano rigide nell'altra direzione, così da sentire le irregolarità nella superficie.
Now crabs don't miss footholds, because they normally move on sand -- until they come to our lab. And where they have a problem with this kind of mesh, because they don't have spines. The crabs are missing spines, so they have a problem in this kind of rough terrain. But of course, we can deal with that because we can produce artificial spines. We can make spines that catch on simulated debris and collapse on removal to easily pull them out. We did that by putting these artificial spines on crabs, as you see here, and then we tested them. Do we really understand that principle of tuning? The answer is, yes! This is slowed down 20-fold, and the crab just zooms across that simulated debris. (Laughter) (Applause) A little better than nature.
I granchi non perdono la presa perché normalmente si muovono sulla sabbia, finché non vengono nel nostro laboratorio e si trovano nei guai con questo tipo di griglia, perché non hanno gli aculei. E quindi se la cavano male in questo terreno sconnesso. Ma è un problema risolvibile, perché possiamo produrre aculei artificiali. Possiamo creare aculei che si aggrappano al reticolo e si piegano quando il granchio si solleva, liberandosi facilmente. Abbiamo messo questi aculei artificiali nei granchi, come vedete qui, e poi li abbiamo testati. Adesso comprendiamo davvero come regolare gli aculei? Sì! Questo è rallentato 20 volte: il granchio semplicemente sfreccia su questo reticolo simulato. (Risate ed applausi). Un po' meglio della Natura.
So to our blueprint, we need to add tuned spines. Now will this help us think about the design of more effective climbing robots? Well, here's RHex: RHex has trouble on rails -- on smooth rails, as you see here. So why not add a spine? My colleagues did this at U. Penn. Dan Koditschek put some steel nails -- very simple version -- on the robot, and here's RHex, now, going over those steel -- those rails. No problem! How does it do it? Let's slow it down and you can see the spines in action. Watch the leg come around, and you'll see it grab on right there. It couldn't do that before; it would just slip and get stuck and tip over. And watch again, right there -- successful.
Al nostro modello, dunque, servono aculei regolati. Questo ci aiuterà a progettare un robot che si arrampica meglio? Beh, ecco RHex. RHex ha problemi con le rotaie lisce. Perchè non aggiungere un aculeo? I miei colleghi della U.Penn l'hanno fatto. Dan Koditscek ha messo delle semplicissime unghie d'acciaio sul robot ed ecco RHex scavalcare questi binari senza problemi! Come fa? Rallentiamolo, così potete vedere gli aculei in azione. Guardate la zampa ruotare e afferrare la superficie proprio lì. Prima non ci riusciva, scivolava e restava bloccata. Adesso invece ce la fa.
Now just because we have a distributed foot and spines doesn't mean you can climb vertical surfaces. This is really, really difficult. But look at this animal do it! One of the ones I'm passing around is climbing up this vertical surface that's a smooth metal plate. It's extraordinary how fast it can do it -- but if you slow it down, you see something that's quite extraordinary. It's a secret. The animal effectively climbs by slipping and look -- and doing, actually, terribly, with respect to grabbing on the surface. It looks, in fact, like it's swimming up the surface. We can actually model that behavior better as a fluid, if you look at it. The distributed foot, actually, is working more like a paddle.
Ora, solo perché abbiamo creato un piede distribuito e aculei non significa che possa arrampicarsi in verticale. Quello è molto, molto difficile. Ma guardate questo animale mentre lo fa. Gli animali che vi sto mostrando si arrampicano su questa lastra verticale di metallo. È straordinario quanto in fretta ci riescano. Ma se rallentate, vedrete una cosa ancora più incredibile. È un segreto. L'animale si arrampica... scivolando! In effetti, scivola moltissimo rispetto a quanto si arrampica sulla superficie, sembra quasi che "nuoti" sulla superficie. Infatti guardandolo, possiamo considerare quel comportamento come in un fluido. Il piede distribuito, in effetti, sta agendo più da remo.
The same is true when we looked at this lizard running on fluidized sand. Watch its feet. It's actually functioning as a paddle even though it's interacting with a surface that we normally think of as a solid. This is not different from what my former undergraduate discovered when she figured out how lizards can run on water itself. Can you use this to make a better robot? Martin Buehler did -- who's now at Boston Dynamics -- he took this idea and made RHex to be Aqua RHex. So here's RHex with paddles, now converted into an incredibly maneuverable swimming robot.
Lo stesso vale per questa lucertola, che corre sulla sabbia fluidificata. Guardate i suoi piedi. Stanno funzionando da remo, benché si muova su una superficie che normalmente consideriamo solida. Il che non è diverso da quello che la mia ex-studentessa scoprì quando capì come le lucertole possano correre sull'acqua. Si può usare tutta questa conoscenza per creare un robot migliore? Lo ha fatto Martin Buehler, che ora lavora alla Boston Dynamics. Con questa idea in mente, trasformò RHex in Aqua RHex. Ecco RHex con i remi. Lo ha trasformato in un robot nuotante incredibilmente manovrabile.
For rough surfaces, though, animals add claws. And you probably feel them if you grabbed it. Did you touch it?
Per le superfici irregolari, tuttavia, agli animali servono artigli. E probabilmente li sentite, se li afferrate. Lo hai toccato?
CA: I did.
(CA) – Sì.
RF: And they do really well at grabbing onto surfaces with these claws. Mark Cutkosky at Stanford University, one of my collaborators, is an extraordinary engineer who developed this technique called Shape Deposition Manufacturing, where he can imbed claws right into an artificial foot. And here's the simple version of a foot for a new robot that I'll show you in a bit. So to our blueprint, let's attach claws. Now if we look at animals, though, to be really maneuverable in all surfaces, the animals use hybrid mechanisms that include claws, and spines, and hairs, and pads, and glue, and capillary adhesion and a whole bunch of other things. These are all from different insects. There's an ant crawling up a vertical surface. Let's look at that ant.
E si aggrappano molto bene, con questi artigli. Mark Cutkosky della Stanford University, uno dei miei collaboratori, è uno straordinario ingegenere, e ha sviluppato questa tecnica chiamata Shape Deposition Manufacturing, con cui può inserire gli artigli dentro un piede artificiale. Ecco la versione base del piede di un nuovo robot che vi mostrerò tra un attimo. Attacchiamo gli artigli al nostro modello. Gli animali, per potersi veramente muovere su tutte le superfici, usano meccanismi ibridi, che includono artigli, aculei, peli, cuscinetti, colla, adesione capillare e molte altre cose. Queste sono tutte foto di insetti differenti. Questa è una formica che si arrampica in verticale. Osserviamola.
This is the foot of an ant. You see the hairs and the claws and this thing here. This is when its foot's in the air. Watch what happens when the foot goes onto your sandwich. You see what happens? That pad comes out. And that's where the glue is. Here from underneath is an ant foot, and when the claws don't dig in, that pad automatically comes out without the ant doing anything. It just extrudes. And this was a hard shot to get -- I think this is the shot of the ant foot on the superstrings. So it's pretty tough to do. This is what it looks like close up -- here's the ant foot, and there's the glue.
Questo è il piede di una formica. Vedete i peli, gli artigli e questa cosa qui. Questo succede quando il suo piede è in aria. Guardate cosa succede quando il piede entra nel vostro sandwich. Vedete cosa succede? Esce questo cuscinetto, che contiene la colla. Questo è un piede di formica ripreso da sotto Quando gli artigli non scavano, quel cuscinetto automaticamente viene fuori senza che la formica faccia nulla. Semplicemente esce. È stato difficile scattare questa foto: sembra la foto di un piede di formica sulle superstringhe. Una cosa difficile. Ecco che aspetto ha, vista da vicino: qui c'è un piede di formica e qui c'è la colla.
And we discovered this glue may be an interesting two-phase mixture. It certainly helps it to hold on. So to our blueprint, we stick on some sticky pads. Now you might think for smooth surfaces we get inspiration here. Now we have something better here. The gecko's a really great example of nanotechnology in nature. These are its feet. They're -- almost look alien. And the secret, which they stick on with, involves their hairy toes. They can run up a surface at a meter per second, take 30 steps in that one second -- you can hardly see them. If we slow it down, they attach their feet at eight milliseconds, and detach them in 16 milliseconds. And when you watch how they detach it, it is bizarre. They peel away from the surface like you'd peel away a piece of tape. Very strange. How do they stick?
E abbiamo scoperto che questa colla potrebbe essere un'interessante miscela bicomponente. Sicuramente lo aiuta a fare presa. Aggiungiamo quindi al nostro modello dei cuscinetti adesivi. Potreste ora pensare che per le superfici lisce potremmo prendere ispirazione da qui. Qui abbiamo però qualcosa di meglio: Il geco, in Natura, è un ottimo esempio di nanotecnologia. Questi sono i suoi piedi. Hanno un aspetto quasi alieno. E il segreto della loro tenace adesione si nasconde nelle setole delle dita. Possono scalare qualunque superficie ad un metro al secondo, e fare 30 passi in quel secondo. È difficile seguirli con lo sguardo. Se rallentiamo, notiamo come attaccano i loro piedi ad 8 millisecondi, e li staccano a 16 millisecondi. E il modo in cui li staccano è bizzarro. Si "strappano via" dalla superficie allo stesso modo in cui voi togliereste un pezzo di scotch. Come si incollano?
If you look at their feet, they have leaf-like structures called linalae with millions of hairs. And each hair has the worst case of split ends possible. It has a hundred to a thousand split ends, and that's the secret, because it allows intimate contact. The gecko has a billion of these 200-nanometer-sized split ends. And they don't stick by glue, or they don't work like Velcro, or they don't work with suction. We discovered they work by intermolecular forces alone. So to our blueprint, we split some hairs. This has inspired the design of the first self-cleaning dry adhesive -- the patent issued, we're happy to say. And here's the simplest version in nature, and here's my collaborator Ron Fearing's attempt at an artificial version of this dry adhesive made from polyurethane. And here's the first attempt to have it work on some load.
Se osservate i piedi, notate delle strutture a foglia chiamate lamine, con milioni di setole. E ciascuna setola ha nel peggior caso possibile una doppia punta. Ha da cento ad un migliaio di doppie punte, ed è quello il segreto. Perchè permette il contatto profondo. Ogni geco ha un miliardo di queste doppie punte, lunghe 200 nanometri. E non si attaccano con la colla, non funzionano come il velcro, o come una ventosa. Abbiamo scoperto che funzionano con le sole forze di Van der Waals. Per il nostro modello, dunque, sdoppieremo alcune punte. Questo ha ispirato il design del primo adesivo secco autopulente in corso di brevettazione, siamo lieti di dirlo. Ecco la più semplice versione in Natura, ecco il tentativo del mio collaboratore, Ron Fearing, di realizzarne una versione artificiale in poliuretano. Ed ecco il primo test di carico. In molti campi diversi
There's enormous interest in this in a variety of different fields. You could think of a thousand possible uses, I'm sure. Lots of people have, and we're excited about realizing this as a product. We have imagined products; for example, this one: we imagined a bio-inspired Band-Aid, where we took the glue off the Band-Aid. We took some hairs from a molting gecko; put three rolls of them on here, and then made this Band-Aid.
si sta guardando a questo adesivo con enorme interesse, ne sono sicuro. Potete pensare a mille usi possibili. Molte persone l'hanno fatto e l'idea di ricavarne un prodotto ci esalta. Abbiamo immaginato molti prodotti, come per esempio questo: abbiamo immaginato un cerotto "bio-ispirato" senza colla: prendiamo alcune setole da un geco in muta, applichiamo tre giri di adesivo e facciamo questo cerotto.
This is an undergraduate volunteer -- we have 30,000 undergraduates so we can choose among them -- that's actually just a red pen mark. But it makes an incredible Band-Aid. It's aerated, it can be peeled off easily, it doesn't cause any irritation, it works underwater. I think this is an extraordinary example of how curiosity-based research -- we just wondered how they climbed up something -- can lead to things that you could never imagine. It's just an example of why we need to support curiosity-based research. Here you are, pulling off the Band-Aid.
Questo è uno studente volontario, - ne abbiamo 30000, quindi possiamo scegliere - questo è solo un evidenziatore rosso. Ma è un cerotto incredibile. È areato, può essere facilmente rimosso, non causa alcuna irritazione, funziona anche sott'acqua, penso sia uno straordinario esempio di come una ricerca basata sulla curiosità (ci eravamo solo chiesti come si arrampicano) possa portare a cose che non avreste mai potuto immaginare. È un esempio del perché serve sostenere la ricerca basata sulla curiosità. E adesso rimuoviamo il cerotto.
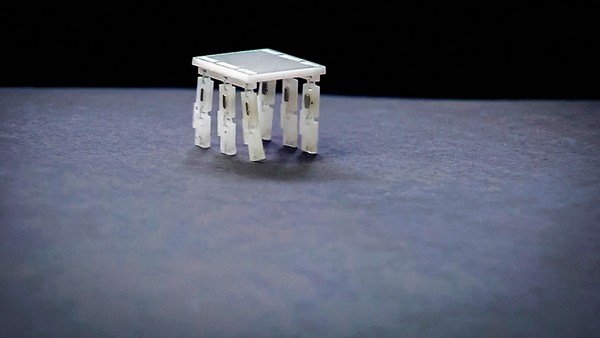
So we've redefined, now, what a foot is. The question is, can we use these secrets, then, to inspire the design of a better foot, better than one that we see in nature? Here's the new project: we're trying to create the first climbing search-and-rescue robot -- no suction or magnets -- that can only move on limited kinds of surfaces. I call the new robot RiSE, for "Robot in Scansorial Environment" -- that's a climbing environment -- and we have an extraordinary team of biologists and engineers creating this robot. And here is RiSE. It's six-legged and has a tail. Here it is on a fence and a tree. And here are RiSE's first steps on an incline. You have the audio? You can hear it go up. And here it is coming up at you, in its first steps up a wall. Now it's only using its simplest feet here, so this is very new. But we think we got the dynamics right of the robot.
Dunque. Abbiamo ridefinito cos'è un piede. Ma allora possiamo riutilizzare questa conoscenza nella progettazione di un piede migliore di uno esistente in Natura? Ecco il nuovo progetto: stiamo cercando di creare il primo robot di ricerca e soccorso in grado di arrampicarsi senza ventose né magneti, che possono muoversi solo su alcuni tipi di superfici. Chiamo il nuovo robot RiSE, Robot in Ambiente di Scalata, un ambiente ripido. Abbiamo un team straordinario di biologi ed ingegneri che stanno creando questo robot. Ed ecco RiSE. Ha sei zampe e una coda. Eccolo su uno steccato e su un albero. E questi sono i primi passi di RiSE su un piano inclinato. Avete l'audio? Potete sentirlo salire. E qui si sta avvicinando a voi, nei suoi primi passi su un muro. Qui sta usando solo il suo piede più semplice, è la prima versione ma pensiamo di avergli dato la dinamica giusta.
Mark Cutkosky, though, is taking it a step further. He's the one able to build this shape-deposition manufactured feet and toes. The next step is to make compliant toes, and try to add spines and claws and set it for dry adhesives. So the idea is to first get the toes and a foot right, attempt to make that climb, and ultimately put it on the robot. And that's exactly what he's done. He's built, in fact, a climbing foot-bot inspired by nature.
Mark Cutkosky, tuttavia, lo sta portando un passo oltre. Lui è quello in grado di costruire piedi e dita con la Shape Deposition Manufacturing. Il prossimo passo è provare a costruire dita compatibili, provare ad aggiungere aculei e artigli, e infine farlo funzionare con gli adesivi secchi. L'idea era di ottenere dita giuste, un piede giusto, cercare di farlo arrampicare e alla fine metterlo sul robot. Ed è esattamente ciò che ha fatto. Ha costruito un piede robotico, ispirato alla Natura e in grado di arrampicarsi.
And here's Cutkosky's and his amazing students' design. So these are tuned toes -- there are six of them, and they use the principles that I just talked about collectively for the blueprint. So this is not using any suction, any glue, and it will ultimately, when it's attached to the robot -- it's as biologically inspired as the animal -- hopefully be able to climb any kind of a surface. Here you see it, next, going up the side of a building at Stanford. It's sped up -- again, it's a foot climbing. It's not the whole robot yet, we're working on it -- now you can see how it's attaching. These tuned structures allow the spines, friction pads and ultimately the adhesive hairs to grab onto very challenging, difficult surfaces. And so they were able to get this thing -- this is now sped up 20 times -- can you imagine it trying to go up and rescue somebody at that upper floor? OK? You can visualize this now; it's not impossible. It's a very challenging task. But more to come later.
Ecco Cutcosky ed il progetto dei suoi incredibili studenti. Queste sono sei dita regolate e usano i vari principi che vi ho descritto per il nostro modello. Questo non usa ventose, né colla e alla fine, quando sarà attaccato al robot --è ispirato alla biologia quanto l'animale-- speriamo possa arrampicarsi su ogni tipo di superficie. Qui lo vedete arrampicarsi sul lato di un edificio a Stanford. Il filmato è accelerato, è un piede che si arrampica, non è ancora l'intero robot, ma ci stiamo lavorando, per ora potete vedere come si aggrappa. Queste strutture regolate permettono agli aculei, ai cuscinetti di attrito e alla fine alle setole adesive di aggrapparsi anche su superfici molto difficili. E sono stati in grado di fare questo -il video è accelerato 20 volte- potete immaginare che vada di sopra e soccorra qualcuno al piano superiore? Potete immaginarlo adesso, non è impossibile - È un compito molto impegnativo. Ma sta per arrivare anche altro.
To finish: we've gotten design secrets from nature by looking at how feet are built. We've learned we should distribute control to smart parts. Don't put it all in the brain, but put some of the control in tuned feet, legs and even body. That nature uses hybrid solutions, not a single solution, to these problems, and they're integrated and beautifully robust. And third, we believe strongly that we do not want to mimic nature but instead be inspired by biology, and use these novel principles with the best engineering solutions that are out there to make -- potentially -- something better than nature.
Per concludere, abbiamo carpito segreti alla Natura osservando come sono costruiti i piedi. Abbiamo imparato che dovremmo distribuire il controllo a parti intelligenti. Non fate fare tutto al cervello, date una parte del controllo a piedi regolati, zampe e perfino all'intero corpo. Abbiamo imparato che la Natura usa soluzioni ibride, non una soluzione unica per questi problemi, e queste soluzioni sono integrate e meravigliosamente solide. E in terzo luogo, crediamo fermamemnte di non voler imitare la Natura, ma piuttosto farci ispirare dalla biologia combinando questo col meglio che la ricerca ingegneristica là fuori può offrire, creando, potenzialmente, qualcosa di migliore della Natura.
So there's a clear message: whether you care about a fundamental, basic research of really interesting, bizarre, wonderful animals, or you want to build a search-and-rescue robot that can help you in an earthquake, or to save someone in a fire, or you care about medicine, we must preserve nature's designs. Otherwise these secrets will be lost forever. Thank you.
Quindi lancio un chiaro messaggio: che voi vogliate fare ricerca di base su animali interessanti, bizzarri, meravigliosi, oppure vogliate costruire un robot di ricerca e soccorso, che possa aiutarvi in un terremoto, o a salvare qualcuno in un incendio, o siate interessati alla Medicina - dobbiamo in ogni caso preservare i progetti della Natura. Altrimenti, questi segreti saranno persi per sempre. Grazie.