I want you to imagine that you're a student in my lab. What I want you to do is to create a biologically inspired design. And so here's the challenge: I want you to help me create a fully 3D, dynamic, parameterized contact model. The translation of that is, could you help me build a foot? And it is a true challenge, and I do want you to help me. Of course, in the challenge there is a prize. It's not quite the TED Prize, but it is an exclusive t-shirt from our lab. So please send me your ideas about how to design a foot.
Je veux que vous imaginiez être un de mes étudiants au labo. Je veux que vous créiez un design inspiré biologiquement. Et voilà donc le défi: Vous allez m'aider à créer un prototype de contact paramétré, en 3D et dynamique. Ce qui se traduit par : M'aideriez-vous à construire un pied? Or c'est un vrai défi et je veux réellement que vous m'aidiez. Bien sûr, pour ce défi il y a un lot à gagner. Pas exactement le Prix TED, mais en exclusivité, un t-shirt de notre labo. Alors envoyez-moi vos idées sur la façon de concevoir un pied.
Now if we want to design a foot, what do we have to do? We have to first know what a foot is. If we go to the dictionary, it says, "It's the lower extremity of a leg that is in direct contact with the ground in standing or walking" That's the traditional definition. But if you wanted to really do research, what do you have to do? You have to go to the literature and look up what's known about feet. So you go to the literature. (Laughter)
Si on veut concevoir un pied, que doit-on faire? On doit d'abord savoir ce qu'est un pied. Dans le dictionnaire on lit, "extrémité inférieure d'une jambe en contact direct avec le sol en position debout ou en marche" C'est la définition traditionnelle. Mais pour faire une vraie recherche, que devez-vous faire? Vous devez étudier la littérature et voir ce qu'on sait des pieds. Alors vous allez étudier la littérature. (Rires)
Maybe you're familiar with this literature. The problem is, there are many, many feet. How do you do this? You need to survey all feet and extract the principles of how they work. And I want you to help me do that in this next clip. As you see this clip, look for principles, and also think about experiments that you might design in order to understand how a foot works.
Peut-être que vous connaissez bien cette littérature. Le problème c'est qu'il y a beaucoup de pieds différents. Comment faire? Il faut observer tous les pieds et extraire des principes de fonctionnement. Et je veux que vous m'aidiez à le faire dans ce clip vidéo. En regardant, cherchez des principes et pensez aussi aux expériences que vous pourriez élaborer afin de comprendre le fonctionnement d'un pied.
See any common themes? Principles? What would you do? What experiments would you run? Wow. (Applause) Our research on the biomechanics of animal locomotion has allowed us to make a blueprint for a foot. It's a design inspired by nature, but it's not a copy of any specific foot you just looked at, but it's a synthesis of the secrets of many, many feet.
Voyez-vous des thèmes communs? Des principes? Que feriez-vous? Quelles expériences tenteriez-vous? Wow. (Applaudissements) Notre recherche sur la biomécanique du déplacement animal nous a permis de créer un plan détaillé pour un pied. C'est un design inspiré par la nature mais ce n'est pas la copie d'un des pieds que l'on vient de voir, c'est une synthèse des atouts secrets de nombreux pieds différents.
Now it turns out that animals can go anywhere. They can locomote on substrates that vary as you saw -- in the probability of contact, the movement of that surface and the type of footholds that are present. If you want to study how a foot works, we're going to have to simulate those surfaces, or simulate that debris. When we did that, here's a new experiment that we did: we put an animal and had it run -- this grass spider -- on a surface with 99 percent of the contact area removed. But it didn't even slow down the animal. It's still running at the human equivalent of 300 miles per hour.
On se rend compte que les animaux peuvent aller partout. Ils se déplacent sur des substrats qui varient -- comme on a pu le voir -- en probabilité de contact, en mouvement de surface et en type de points d'ancrage présents. Pour étudier comment marche un pied, on va devoir simuler ces surfaces, ou simuler ces débris. Cela fait, voilà une nouvelle expérience qu'on a tentée : on a pris un animal qu'on a fait courir -- cette araignée -- sur une surface où 99% de la zone de contact a été retirée Mais ça ne l'a même pas ralentie. Elle coure toujours à l'équivalent pour nous de 480 km/h.
Now how could it do that? Well, look more carefully. When we slow it down 50 times we see how the leg is hitting that simulated debris. The leg is acting as a foot. And in fact, the animal contacts other parts of its leg more frequently than the traditionally defined foot. The foot is distributed along the whole leg. You can do another experiment where you can take a cockroach with a foot, and you can remove its foot. I'm passing some cockroaches around. Take a look at their feet. Without a foot, here's what it does. It doesn't even slow down. It can run the same speed without even that segment. No problem for the cockroach -- they can grow them back, if you care. How do they do it? Look carefully: this is slowed down 100 times, and watch what it's doing with the rest of its leg. It's acting, again, as a distributed foot -- very effective.
Alors comment fait-elle? Observez plus attentivement. Quand on ralenti 50 fois, on voit comment sa jambe touche le débris simulé. Sa jambe agit comme un pied. Et en fait, elle utilise les autres parties de sa jambe plus fréquemment que le pied à proprement parler. Le pied est réparti le long de toute la jambe. Vous pouvez faire une autre expérience avec un cafard auquel vous retirez un pied. Je fais passer des cafards, regardez bien leurs pieds. Sans pied, voilà ce qui se passe. Il ne ralentit même pas. Sans cet appui, il peut courir exactement à la même vitesse. Pas de problème pour le cafard -- et leur jambe repousse, si ça vous inquiète. Comment font-ils? Regardez bien : la vidéo est ralentie cent fois et regardez ce qu'il fait du reste de sa jambe. Elle agit, encore une fois, comme un pied réparti. Très efficace.
Now, the question we had is, how general is a distributed foot? And the next behavior I'll show you of this animal just stunned us the first time that we saw it. Journalists, this is off the record; it's embargoed. Take a look at what that is! That's a bipedal octopus that's disguised as a rolling coconut. It was discovered by Christina Huffard and filmed by Sea Studios, right here from Monterey.
La question ainsi posée est, ce type de pied est il courant? La première fois, l'attitude de l'animal suivant nous a ébahi. Messieurs les journalistes, ceci est non-officiel -- regardez ce que l'on voit! Voici une pieuvre bipède déguisée en noix de coco roulante. Elle a été découverte par Christina Huffard et filmée par Sea Studios, ici-même à Monterey.
We've also described another species of bipedal octopus. This one disguises itself as floating algae. It walks on two legs and it holds the other arms up in the air so that it can't be seen. (Applause) And look what it does with its foot to get over challenging terrain. It uses that beautiful distributed foot to make it as if those obstacles are not even there -- truly extraordinary.
Nous avons également décrit une autre espèce de pieuvre bipède. Celle-ci se déguise en algue flottante. Elle marche sur deux jambes et lève ses bras pour se camoufler. (Applaudissements) Et regardez ce qu'elle fait de ses pieds pour traverser des terrains difficiles. Elle utilise ce beau pied réparti, faisant comme si les obstacles n'existaient même pas. Réellement extraordinaire.
In 1951, Escher made this drawing. He thought he created an animal fantasy. But we know that art imitates life, and it turns out nature, three million years ago, evolved the next animal. It's a shrimp-like animal called the stomatopod, and here's how it moves on the beaches of Panama: it actually rolls, and it can even roll uphill. It's the ultimate distributed foot: its whole body in this case is acting like its foot.
En 1951, Escher fait ce dessin. Il pensait avoir créé un animal fantaisiste. Mais nous savons que l'art imite la vie et il semble que la nature a créé cet animal il y a 3 millions d'années. C'est un stomatopode, qui ressemble à une crevette, et voilà comment il se déplace sur les plages de Panama : il roule sur lui-même et peut même rouler sur une pente ascendante. C'est le pied réparti ultime; son corps entier est utilisé comme un pied.
So, if we want to then, to our blueprint, add the first important feature, we want to add distributed foot contact. Not just with the traditional foot, but also the leg, and even of the body. Can this help us inspire the design of novel robots? We biologically inspired this robot, named RHex, built by these extraordinary engineers over the last few years. RHex's foot started off to be quite simple, then it got tuned over time, and ultimately resulted in this half circle. Why is that? The video will show you. Watch where the robot, now, contacts its leg in order to deal with this very difficult terrain. What you'll see, in fact, is that it's using that half circle leg as a distributed foot. Watch it go over this. You can see it here well on this debris. Extraordinary. No sensing, all the control is built right into the tuned legs. Really simple, but beautiful.
Alors, pour ajouter à notre prototype la première fonctionnalité importante, nous voulons en faire un pied à contact réparti. Non seulement pour ce qu'on appelle le pied, mais pour toute la jambe, et même le corps. Est-ce que cela peut nous aider à dessiner de nouveaux robots? Nous avons été inspiré par la biologie pour ce robot appelé RHex, construit ces dernières années par d'extraordinaires ingénieurs. Le pied de RHex était très simple au début, et il a évolué jusqu'à être ce demi-cercle. Et pourquoi? La vidéo va vous le montrer. Regardez comment le robot utilise sa jambe pour surmonter les difficultés du terrain. Ce que vous voyez, c'est l'utilisation de la jambe semi-circulaire comme un pied à contact réparti. Regardez-le dépasser ça. On le voit bien dans ces débris. Extraordinaire. Très simple mais magnifique.
Now, you might have noticed something else about the animals when they were running over the rough terrain. And my assistant's going to help me here. When you touched the cockroach leg -- can you get the microphone for him? When you touched the cockroach leg, what did it feel like? Did you notice something?
Vous avez peut-être remarque quelque chose d'autre quand les animaux couraient sur ce terrain difficile. Mon assistant va m'aider pour ce coup-là. Quand tu as touché la patte du cafard -- on peut lui trouver un micro? Quand tu as touché la patte du cafard, qu'as-tu senti? Tu as remarqué quelque chose?
Boy: Spiny.
Garçon: C'est épineux.
Robert Full: It's spiny, right? It's really spiny, isn't it? It sort of hurts. Maybe we could give it to our curator and see if he'd be brave enough to touch the cockroach. (Laughter)
Robert Full: Épineux hein? Très épineux même? Ça fait un peu mal. Peut-être que tu peux le donner au conservateur et voir s'il a le courage de le toucher. (Rires)
Chris Anderson: Did you touch it?
Chris Anderson: Tu l'as touché?
RF: So if you look carefully at this, what you see is that they have spines and until a few weeks ago, no one knew what they did. They assumed that they were for protection and for sensory structures. We found that they're for something else -- here's a segment of that spine. They're tuned such that they easily collapse in one direction to pull the leg out from debris, but they're stiff in the other direction so they capture disparities in the surface.
RF: Si vous regardez attentivement vous verrez des épines et jusqu'à quelques semaines, personne ne savait qu'il y en avait. Ils se sont dit que c'était un moyen de défense et des capteurs sensoriels. Nous avons découvert que ce n'est pas ça -- voilà un segment d'épine. Ils sont prévus pour se pencher facilement dans une direction pour retirer la jambe des décombres, mais ils se raidissent dans l'autre direction pour s'appuyer sur les disparités de la surface.
Now crabs don't miss footholds, because they normally move on sand -- until they come to our lab. And where they have a problem with this kind of mesh, because they don't have spines. The crabs are missing spines, so they have a problem in this kind of rough terrain. But of course, we can deal with that because we can produce artificial spines. We can make spines that catch on simulated debris and collapse on removal to easily pull them out. We did that by putting these artificial spines on crabs, as you see here, and then we tested them. Do we really understand that principle of tuning? The answer is, yes! This is slowed down 20-fold, and the crab just zooms across that simulated debris. (Laughter) (Applause) A little better than nature.
Ces points d'ancrage ne manquent pas aux crabes car ils se déplacent sur du sable -- jusqu'à leur arrivée dans notre labo -- où ils découvrent leur problème avec ce genre de filets, parce qu'ils n'ont pas d'épines. Les crabes n'ont pas d'épines alors ils ont des difficultés sur ce genre de terrain abrupt. Mais bien sûr, nous pouvons remédier à cela, car nous pouvons créer des épines artificielles. Nous pouvons fabriquer des épines qui s'accrochent aux débris synthétiques et se couchent lors du retrait pour les retirer facilement. Nous avons fait cela en fixant ces épines aux crabes, comme vous le voyez ici, et nous les avons testées. Est-ce que nous comprenons vraiment ce principe de mise au point? La réponse est, oui! Ceci est ralenti 20 fois, le crabe traverse les décombres à toute vitesse. (Rires) (Applaudissements) Un petit peu mieux que la nature.
So to our blueprint, we need to add tuned spines. Now will this help us think about the design of more effective climbing robots? Well, here's RHex: RHex has trouble on rails -- on smooth rails, as you see here. So why not add a spine? My colleagues did this at U. Penn. Dan Koditschek put some steel nails -- very simple version -- on the robot, and here's RHex, now, going over those steel -- those rails. No problem! How does it do it? Let's slow it down and you can see the spines in action. Watch the leg come around, and you'll see it grab on right there. It couldn't do that before; it would just slip and get stuck and tip over. And watch again, right there -- successful.
Alors à notre prototype, nous devons ajouter des épines bien réglées. Ceci va-t-il nous aider à penser un design plus efficace pour des robots grimpeurs? Eh bien, voici RHex, qui a des problèmes sur les rails lisses, comme on le voit ici. Alors pourquoi ne pas ajouter une épine? Mes collègues l'ont fait à U Penn. Dan Koditschek a mis des ongles d'acier -- une version très simple -- sur le robot -- et voilà RHex qui dépasse maintenant ces rails. Sans problème! Comment fait-il? Ralentissons la vidéo et voyons les épines en action. Regardez la jambe pivoter et vous voyez le robot s'accrocher juste ici. Il ne pouvait pas le faire avant, il glissait, se bloquait et basculait. Regardons encore, juste ici -- succès!
Now just because we have a distributed foot and spines doesn't mean you can climb vertical surfaces. This is really, really difficult. But look at this animal do it! One of the ones I'm passing around is climbing up this vertical surface that's a smooth metal plate. It's extraordinary how fast it can do it -- but if you slow it down, you see something that's quite extraordinary. It's a secret. The animal effectively climbs by slipping and look -- and doing, actually, terribly, with respect to grabbing on the surface. It looks, in fact, like it's swimming up the surface. We can actually model that behavior better as a fluid, if you look at it. The distributed foot, actually, is working more like a paddle.
Ceci dit, ce pied réparti et ces épines ne suffisent pas pour grimper des surfaces verticales. C'est très, très difficile. Mais regardez ces animaux le faire! L'un de ceux que je vous fais passer grimpe des surfaces verticales en métal lisse. La vitesse à laquelle il le fait est extraordinaire -- mais si vous ralentissez, vous voyez quelque chose d'encore plus extraordinaire. C'est un secret. L'animal grimpe très bien en glissant et regardez -- il se débrouille en fait très mal pour s'accrocher à la surface. On dirait presque qu'il nage sur cette surface. On peut mieux représenter ce comportement si on le regarde comme un fluide. Le pied réparti fonctionne en fait comme une rame.
The same is true when we looked at this lizard running on fluidized sand. Watch its feet. It's actually functioning as a paddle even though it's interacting with a surface that we normally think of as a solid. This is not different from what my former undergraduate discovered when she figured out how lizards can run on water itself. Can you use this to make a better robot? Martin Buehler did -- who's now at Boston Dynamics -- he took this idea and made RHex to be Aqua RHex. So here's RHex with paddles, now converted into an incredibly maneuverable swimming robot.
C'est également vrai pour ce lézard courant sur des sables mouvants. Regardez ses pieds. Ils fonctionnent comme une rame même si l'interaction se fait avec une surface solide. C'est assez proche de la découverte d'une de mes anciennes étudiantes qui a compris comment les lézards courent sur l'eau. Pouvons-nous utiliser cela pour améliorer notre robot? Martin Buehler qui travaille maintenant chez Boston Dynamics, l'a fait. Il a pris cette idée et a transformé RHex en Aqua RHex. Maintenant voilà RHex avec des palmes, converti en robot nageur extrêmement manœuvrable.
For rough surfaces, though, animals add claws. And you probably feel them if you grabbed it. Did you touch it?
Pour les surfaces inégales cependant, les animaux ont des griffes. Et vous les avez senties si vous les avez attrapés. Tu les as touchés?
CA: I did.
CA: Oui
RF: And they do really well at grabbing onto surfaces with these claws. Mark Cutkosky at Stanford University, one of my collaborators, is an extraordinary engineer who developed this technique called Shape Deposition Manufacturing, where he can imbed claws right into an artificial foot. And here's the simple version of a foot for a new robot that I'll show you in a bit. So to our blueprint, let's attach claws. Now if we look at animals, though, to be really maneuverable in all surfaces, the animals use hybrid mechanisms that include claws, and spines, and hairs, and pads, and glue, and capillary adhesion and a whole bunch of other things. These are all from different insects. There's an ant crawling up a vertical surface. Let's look at that ant.
RF: Et ils s'accrochent très bien aux surfaces avec ces griffes. Mark Cutkosky à l'Université de Stanford, un de mes collaborateurs, est un ingénieur extraordinaire qui a développé cette technique appelée Shape Deposition Manufacturing qui consiste à inclure des griffes dans un pied artificiel. Voilà la version simplifiée du pied d'un nouveau robot que vous verrez tout à l'heure. Alors rajoutons des griffes à notre prototype. En regardant les animaux qui manœuvrent dans tous types de surfaces, on voit qu'ils utilisent des mécanismes hybrides qui incluent des griffes, des épines, des poils, des coussinets collants, une adhésion capillaire et toute sorte d'autres choses. Ces mécanismes viennent de différents insectes. Voilà une fourmi qui grimpe une surface verticale. Observons cette fourmi.
This is the foot of an ant. You see the hairs and the claws and this thing here. This is when its foot's in the air. Watch what happens when the foot goes onto your sandwich. You see what happens? That pad comes out. And that's where the glue is. Here from underneath is an ant foot, and when the claws don't dig in, that pad automatically comes out without the ant doing anything. It just extrudes. And this was a hard shot to get -- I think this is the shot of the ant foot on the superstrings. So it's pretty tough to do. This is what it looks like close up -- here's the ant foot, and there's the glue.
Voici son pied. Vous pouvez voir les poils, les griffes et cette chose ici. Voici le pied quand il est en l'air. Regardez ce qui arrive quand le pied se pose sur votre sandwich. Vous voyez ce qui se passe? Ce coussinet sort. Et c'est là que se trouve la colle. Voici une vue du dessous d'un pied de fourmi quand les griffes ne peuvent s'accrocher à rien, le coussinet sort sans que la fourmi ne fasse quoi que ce soit. Il se projette tout simplement. C'était une photo dure à prendre -- Je pense que c'est un pied de fourmi sur des fils très fins. C'est assez difficile à faire. Voilà à quoi cela ressemble de très près -- voici le pied de la fourmi et voilà la colle.
And we discovered this glue may be an interesting two-phase mixture. It certainly helps it to hold on. So to our blueprint, we stick on some sticky pads. Now you might think for smooth surfaces we get inspiration here. Now we have something better here. The gecko's a really great example of nanotechnology in nature. These are its feet. They're -- almost look alien. And the secret, which they stick on with, involves their hairy toes. They can run up a surface at a meter per second, take 30 steps in that one second -- you can hardly see them. If we slow it down, they attach their feet at eight milliseconds, and detach them in 16 milliseconds. And when you watch how they detach it, it is bizarre. They peel away from the surface like you'd peel away a piece of tape. Very strange. How do they stick?
On a découvert que cette colle est probablement une mixture biphasée intéressante. Cela aide sûrement la fourmi à tenir. Alors nous rajoutons des coussinets collants à notre prototype. Maintenant pour les surfaces lisses, nous pourrions nous inspirer de cela. Mais nous avons trouvé mieux. Le gecko est un excellent exemple de nano-technologie dans la nature. Voilà ses pieds. Ils ont l'air presque extra-terrestres. Le secret auxquels ils s'attachent implique leur doigts poilus. Ils peuvent grimper une surface en courant à un mètre par seconde, faisant 30 pas pendant cette seconde -- on les distingue à peine. Si l'on ralentit, ils attachent leurs pieds à 8 millisecondes et les détachent à 16 millisecondes. Et quand vous regardez comment ils les détachent, c'est bizarre. Ils pèlent leur pied hors de la surface comme un morceau de scotch. Très étrange. Comment tiennent-ils?
If you look at their feet, they have leaf-like structures called linalae with millions of hairs. And each hair has the worst case of split ends possible. It has a hundred to a thousand split ends, and that's the secret, because it allows intimate contact. The gecko has a billion of these 200-nanometer-sized split ends. And they don't stick by glue, or they don't work like Velcro, or they don't work with suction. We discovered they work by intermolecular forces alone. So to our blueprint, we split some hairs. This has inspired the design of the first self-cleaning dry adhesive -- the patent issued, we're happy to say. And here's the simplest version in nature, and here's my collaborator Ron Fearing's attempt at an artificial version of this dry adhesive made from polyurethane. And here's the first attempt to have it work on some load.
En regardant leurs pieds, on voit une structure appelées linalae qui ressemblent à des feuilles avec des millions de poils. Et chaque poil est le pire cas possible de pointes sèches et cassantes. Entre une centaine et un millier de pointes cassées, qui permettent en fait un contact très proche avec la surface. Le gecko a un milliard de ces pointes de 200 nanomètres de longueur. Et ils ne tiennent pas grâce à de la colle, comme le velcro ou des ventouses. Nous avons découvert qu'ils marchent grâce à de simples forces intermoléculaires. Alors à notre prototype, nous rajoutons des pointes cassantes. Ceci à inspiré le design du premier scotch auto-nettoyant -- nous sommes fiers que le brevet ait été déposé. Voici la version la plus simple dans la nature, et voilà la tentative de mon collaborateur Ron Fearing d'une version artificielle de cet adhésif, faite de polyuréthane. Et voilà la première tentative de le faire fonctionner avec un poids.
There's enormous interest in this in a variety of different fields. You could think of a thousand possible uses, I'm sure. Lots of people have, and we're excited about realizing this as a product. We have imagined products; for example, this one: we imagined a bio-inspired Band-Aid, where we took the glue off the Band-Aid. We took some hairs from a molting gecko; put three rolls of them on here, and then made this Band-Aid.
Il y a un grand intérêt pour cette recherche dans de nombreux domaines. Vous pouvez imaginer des milliers d'utilisation, j'en suis sûr. Beaucoup de gens l'ont fait et nous sommes enthousiastes à l'idée de réaliser ceci pour un produit. Nous avons imaginé des produits, par exemple, celui-ci : nous avons imaginé un pansement d'inspiration biologique en supprimant la colle. Nous avons pris des poils d'une mue de gecko; mis trois rouleaux de ceux-ci ensemble et fabriqué ce pansement.
This is an undergraduate volunteer -- we have 30,000 undergraduates so we can choose among them -- that's actually just a red pen mark. But it makes an incredible Band-Aid. It's aerated, it can be peeled off easily, it doesn't cause any irritation, it works underwater. I think this is an extraordinary example of how curiosity-based research -- we just wondered how they climbed up something -- can lead to things that you could never imagine. It's just an example of why we need to support curiosity-based research. Here you are, pulling off the Band-Aid.
Voilà un étudiant volontaire -- nous avons 30 000 étudiants de premier cycle que nous pouvons mobiliser -- c'est seulement une marque au feutre rouge. Mais cela fait un pansement incroyable. Il est aéré, peut être enlevé facilement, ne cause pas d'irritation et tient sous l'eau. Je pense que c'est un exemple extraordinaire de l'application inimaginable à la base de recherches effectuées par curiosité sur la façon dont les animaux grimpent sur certaines surfaces. C'est juste un exemple de la raison pour laquelle il faut soutenir ce type de recherche curieuse. Voilà, on retire le pansement.
So we've redefined, now, what a foot is. The question is, can we use these secrets, then, to inspire the design of a better foot, better than one that we see in nature? Here's the new project: we're trying to create the first climbing search-and-rescue robot -- no suction or magnets -- that can only move on limited kinds of surfaces. I call the new robot RiSE, for "Robot in Scansorial Environment" -- that's a climbing environment -- and we have an extraordinary team of biologists and engineers creating this robot. And here is RiSE. It's six-legged and has a tail. Here it is on a fence and a tree. And here are RiSE's first steps on an incline. You have the audio? You can hear it go up. And here it is coming up at you, in its first steps up a wall. Now it's only using its simplest feet here, so this is very new. But we think we got the dynamics right of the robot.
Nous avons donc redéfini ce qu'est un pied. La question est de savoir si nous pouvons utiliser ces secrets pour inspirer le design d'un meilleur pied que ceux vus dans la nature? Voici le nouveau projet : nous essayons de créer le premier robot secouriste grimpeur -- sans ventouses ni aimants -- qui peut seulement se déplacer sur un nombre limité de type de surfaces. Je l'ai appelé RiSE pour "Robot in Scansorial Environment " -- pour un environnement d'escalade -- et nous avons une équipe incroyable de biologistes et d'ingénieurs créant ce robot. Voilà RiSE. Il a six pattes et une queue. Le voilà sur une barrière et un arbre. Voilà ses premiers pas sur un plan incliné. Vous avez le son? On peut l'entendre grimper. Le voilà qui grimpe vers vous, effectuant ses premiers pas sur un mur. À ce moment il utilise seulement son pied le plus simple, ici, c'est tout à fait nouveau. Mais nous pensons que la dynamique trouvée est la bonne pour le robot.
Mark Cutkosky, though, is taking it a step further. He's the one able to build this shape-deposition manufactured feet and toes. The next step is to make compliant toes, and try to add spines and claws and set it for dry adhesives. So the idea is to first get the toes and a foot right, attempt to make that climb, and ultimately put it on the robot. And that's exactly what he's done. He's built, in fact, a climbing foot-bot inspired by nature.
Mark Cutkosky cependant, mène le projet un peu plus loin encore. C'est lui qui est capable de construire ces pieds et doigts manufacturés. L'étape suivanet est de fabriquer des doigts adaptés, d'essayer de rajouter des épines et des griffes et de les préparer pour de l'adhésif. L'idée est de réussir d'abord les doigts et un pied, puis de tenter de les faire escalader et finalement de les ajouter à un robot. Et c'est exactement ce qu'il a fait. Il a construit en fait, un robot-pied grimpeur inspiré par la nature.
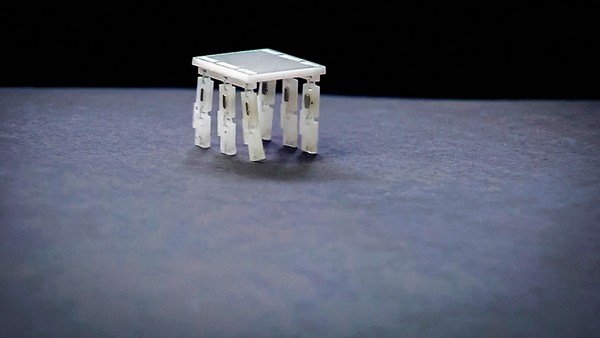
And here's Cutkosky's and his amazing students' design. So these are tuned toes -- there are six of them, and they use the principles that I just talked about collectively for the blueprint. So this is not using any suction, any glue, and it will ultimately, when it's attached to the robot -- it's as biologically inspired as the animal -- hopefully be able to climb any kind of a surface. Here you see it, next, going up the side of a building at Stanford. It's sped up -- again, it's a foot climbing. It's not the whole robot yet, we're working on it -- now you can see how it's attaching. These tuned structures allow the spines, friction pads and ultimately the adhesive hairs to grab onto very challenging, difficult surfaces. And so they were able to get this thing -- this is now sped up 20 times -- can you imagine it trying to go up and rescue somebody at that upper floor? OK? You can visualize this now; it's not impossible. It's a very challenging task. But more to come later.
Voici le design de Cutkosky et de ses incroyables élèves. Voilà les doigts de pieds mis au point -- il y en a six, et ils fonctionnent selon les principes discutés collectivement pour le prototype. Donc il n'y a ni ventouses, ni colle, et il sera à terme capable, une fois rattaché au robot -- inspiré biologiquement comme les animaux -- d'escalader tout type de surface. Ici vous le voyez gravir la façade d'un bâtiment à Stanford. La vidéo est accélérée -- encore une fois, c'est le pied qui grimpe. Ce n'est pas encore le robot entier, nous sommes en train d'y travailler -- là vous voyez comment il s'accroche. Ces structures mises au point permettent aux épines, aux coussinets de frottement et enfin aux poils adhésifs de s'accrocher à des surfaces très difficiles et inégales. Et ils ont réussi à obtenir ça -- ici c'est accéléré 20 fois -- Pouvez-vous l'imaginer escalader et sauver quelqu'un à l'étage? OK? Vous pouvez voir maintenant que ce n'est pas impossible. C'est un très grand défi. Mais nous en reparlerons.
To finish: we've gotten design secrets from nature by looking at how feet are built. We've learned we should distribute control to smart parts. Don't put it all in the brain, but put some of the control in tuned feet, legs and even body. That nature uses hybrid solutions, not a single solution, to these problems, and they're integrated and beautifully robust. And third, we believe strongly that we do not want to mimic nature but instead be inspired by biology, and use these novel principles with the best engineering solutions that are out there to make -- potentially -- something better than nature.
Pour finir : nous avons utilisé des design naturels secrets en observant la construction des pieds. Nous avons appris que nous devons répartir le contrôle à plusieurs petites parties. Il ne faut pas compter uniquement sur un contrôle central par l'ordinateur, mais donner du contrôle via le réglage des pieds, des pattes et même du corps. La nature donne des solutions hybrides et non pas une solution unique à ces problèmes, et elles sont intégrées et très résistantes. Troisièmement, nous croyons fermement qu'il ne faut pas imiter la nature mais s'inspirer de la biologie et utiliser ces nouveaux principes avec les meilleurs solutions d'ingénierie existantes pour créer -- potentiellement -- quelque chose de mieux que la nature.
So there's a clear message: whether you care about a fundamental, basic research of really interesting, bizarre, wonderful animals, or you want to build a search-and-rescue robot that can help you in an earthquake, or to save someone in a fire, or you care about medicine, we must preserve nature's designs. Otherwise these secrets will be lost forever. Thank you.
Le message est très clair : que vous vous intéressiez à la recherche fondamentale de base sur des animaux intéressants, bizarres et incroyables, ou que vous vouliez construire un robot secouriste qui vous aidera pendant un tremblement de terre ou à sauver quelqu'un des flammes, ou que vous vous sentiez concerné par la médecine, nous devons préserver le design de la nature. Sinon ces secrets seront perdus pour toujours. Merci.