I want you to imagine that you're a student in my lab. What I want you to do is to create a biologically inspired design. And so here's the challenge: I want you to help me create a fully 3D, dynamic, parameterized contact model. The translation of that is, could you help me build a foot? And it is a true challenge, and I do want you to help me. Of course, in the challenge there is a prize. It's not quite the TED Prize, but it is an exclusive t-shirt from our lab. So please send me your ideas about how to design a foot.
Quiero que imaginen que son estudiantes de mi laboratorio. Quiero que creen un diseño inspirado en biología. Entonces este es el desafío: Quiero que me ayuden a crear un modelo de contacto totalmente 3D, dinámico y parametrizado. Traducido sería: ¿me ayudarían a contruir un pie? Es que es un verdadero reto y realmente quiero que me ayuden Claro, en el reto hay un premio. No será el TED Prize pero es una camiseta exclusiva de nuestro laboratorio. Así que mándenme sus ideas sobre cómo diseñar un pie.
Now if we want to design a foot, what do we have to do? We have to first know what a foot is. If we go to the dictionary, it says, "It's the lower extremity of a leg that is in direct contact with the ground in standing or walking" That's the traditional definition. But if you wanted to really do research, what do you have to do? You have to go to the literature and look up what's known about feet. So you go to the literature. (Laughter)
Ahora, si queremos diseñar un pie, ¿qué tenemos que hacer? Primero tenemos que saber qué es un pie. Si vamos al diccionario, dice: "Es la extremidad inferior de una pierna que está en contacto directo con el suelo cuando se está de pie o caminando" Esa es la definición tradicional. Pero si deseamos realmente investigar, ¿qué tenemos que hacer? Hay que ir a la literatura y ver qué se sabe sobre el pie. Así que vamos a la literatura. (Risas)
Maybe you're familiar with this literature. The problem is, there are many, many feet. How do you do this? You need to survey all feet and extract the principles of how they work. And I want you to help me do that in this next clip. As you see this clip, look for principles, and also think about experiments that you might design in order to understand how a foot works.
Quizá estén familiarizados con esta literatura. El problema es que hay muchos, muchos pies. ¿Cómo se hace? Hay que inspeccionar todos los pies y extraer principios de cómo funcionan. Y quiero que me ayuden a hacer eso en el siguiente video. Mientras ven este video busquen los principios y piensen también en los experimentos que podrían diseñar para entender cómo funciona un pie.
See any common themes? Principles? What would you do? What experiments would you run? Wow. (Applause) Our research on the biomechanics of animal locomotion has allowed us to make a blueprint for a foot. It's a design inspired by nature, but it's not a copy of any specific foot you just looked at, but it's a synthesis of the secrets of many, many feet.
¿Ven algunos temas comunes? ¿Principios? ¿Qué harían? ¿Qué experimentos realizarían? ¡Guau! (Aplausos) Nuestra investigación de la biomecánica de la locomoción animal nos ha permitido hacer un plano del pie. Es un diseño inspirado en la Naturaleza pero no es copia de un pie específico que uno vio sino una síntesis de los secretos de muchos, muchos pies.
Now it turns out that animals can go anywhere. They can locomote on substrates that vary as you saw -- in the probability of contact, the movement of that surface and the type of footholds that are present. If you want to study how a foot works, we're going to have to simulate those surfaces, or simulate that debris. When we did that, here's a new experiment that we did: we put an animal and had it run -- this grass spider -- on a surface with 99 percent of the contact area removed. But it didn't even slow down the animal. It's still running at the human equivalent of 300 miles per hour.
Ahora resulta que los animales pueden ir donde sea. Pueden desplazarse en superficies que, como vieron, varían en la probabilidad de contacto, el movimiento de esa superficie y el punto de apoyo de los pies que están presentes. Si se quiere estudiar cómo funcionan los pies vamos a tener que simular esas superficies, o simular esas piedras. Luego de eso hicimos un experimento: pusimos un animal y lo hicimos correr, a esta araña de pasto, en una superficie con el 99% del área de contacto retirada. Pero ni siquiera eso redujo su velocidad. Aun esta corriendo al equivalente humano de 480 km por hora.
Now how could it do that? Well, look more carefully. When we slow it down 50 times we see how the leg is hitting that simulated debris. The leg is acting as a foot. And in fact, the animal contacts other parts of its leg more frequently than the traditionally defined foot. The foot is distributed along the whole leg. You can do another experiment where you can take a cockroach with a foot, and you can remove its foot. I'm passing some cockroaches around. Take a look at their feet. Without a foot, here's what it does. It doesn't even slow down. It can run the same speed without even that segment. No problem for the cockroach -- they can grow them back, if you care. How do they do it? Look carefully: this is slowed down 100 times, and watch what it's doing with the rest of its leg. It's acting, again, as a distributed foot -- very effective.
Ahora, ¿cómo pudo hacerlo? Bien, miremos más detenidamente. Cuando reducimos la velocidad 50 veces vemos cómo la pata está golpeando ese escombro simulado. La pata actúa como pie. Y, de hecho, el animal hace contacto con otras partes de su pata más seguido que con el pie definido tradicionalmente. El pie está distribuído en toda la pata. Pueden hacer otro experimento donde se toma una cucaracha con un pie y se le quita el pie. Estoy pasando algunas cucarachas en el auditorio. Miren sus pies. Sin un pie esto es lo que hace. Ni siquiera se desacelera. Puede correr a la misma velocidad sin siquiera esa parte. No es problema para la cucaracha; pueden regenerarlas, si les preocupa. ¿Cómo lo hacen? Miren detenidamente: 100 veces más lento miren qué hace con el resto de sus patas. Actúa, nuevamente, como un pie distribuido. Muy eficaz.
Now, the question we had is, how general is a distributed foot? And the next behavior I'll show you of this animal just stunned us the first time that we saw it. Journalists, this is off the record; it's embargoed. Take a look at what that is! That's a bipedal octopus that's disguised as a rolling coconut. It was discovered by Christina Huffard and filmed by Sea Studios, right here from Monterey.
Ahora, la pregunta que nos hicimos es ¿cuán general es un pie distribuido? El próximo comportamiento que les mostraré de este animal nos sorprendió la primera vez que lo vimos. Periodistas, esto es confidencial ¡miren qué es! Es un pulpo bípedo disfrazado de coco rodante. Fue descubierto por Christina Huffard y filmado por Sea Studios, aquí en Monterrey.
We've also described another species of bipedal octopus. This one disguises itself as floating algae. It walks on two legs and it holds the other arms up in the air so that it can't be seen. (Applause) And look what it does with its foot to get over challenging terrain. It uses that beautiful distributed foot to make it as if those obstacles are not even there -- truly extraordinary.
También describimos otras especies de pulpos bípedos. Este se disfraza de alga flotante. Camina en dos patas y deja las otras en el aire para que no se vean. (Aplausos) Y miren lo que hace con su pie para reponerse de terrenos complicados. Usa su pie distribuido para hacer como que esos obstáculos no estuvieran allí. Realmente extraordinario.
In 1951, Escher made this drawing. He thought he created an animal fantasy. But we know that art imitates life, and it turns out nature, three million years ago, evolved the next animal. It's a shrimp-like animal called the stomatopod, and here's how it moves on the beaches of Panama: it actually rolls, and it can even roll uphill. It's the ultimate distributed foot: its whole body in this case is acting like its foot.
En 1951 Escher hizo este dibujo. Pensaba que creaba una fantasía animal. Pero sabemos que el arte imita la vida y se vuelve naturaleza, hace tres millones de años, evolucionó el siguiente animal. Es un animal tipo camarón llamado estomatópodo y así es como se mueve en las playas de Panamá: en verdad rueda, y hasta puede hacerlo cuesta arriba. Es el pie distribuido definitivo; todo su cuerpo en este caso hace las veces de pie.
So, if we want to then, to our blueprint, add the first important feature, we want to add distributed foot contact. Not just with the traditional foot, but also the leg, and even of the body. Can this help us inspire the design of novel robots? We biologically inspired this robot, named RHex, built by these extraordinary engineers over the last few years. RHex's foot started off to be quite simple, then it got tuned over time, and ultimately resulted in this half circle. Why is that? The video will show you. Watch where the robot, now, contacts its leg in order to deal with this very difficult terrain. What you'll see, in fact, is that it's using that half circle leg as a distributed foot. Watch it go over this. You can see it here well on this debris. Extraordinary. No sensing, all the control is built right into the tuned legs. Really simple, but beautiful.
Así, si queremos agregarle a nuestro diseño la primera característica importante queremos agregarle contacto de pie distribuido. No sólo con el pie tradicional sino también a la pata y a todo el cuerpo. ¿Puede esto inspirar el diseño de nuevos robots? Nos inpiró, biológicamente, este robot llamado RHex construido por esos ingenieros extraordinarios en los últimos años. El pie del RHex comenzó como algo muy simple luego se fue refinando con el tiempo y finalmente terminó en este semicírculo. ¿Por qué? Lo verán en el video. Miren dónde hace contacto el robot con su pata para sortear este terreno difícil. Van a ver que, de hecho, está usando esa pata semicircular como pie distribuido. Mírenlo en movimiento. Pueden verlo bien en estos escombros. Extraordinario. Sin sentido, todo el control está en las patas adaptadas Realmente simple pero hermoso.
Now, you might have noticed something else about the animals when they were running over the rough terrain. And my assistant's going to help me here. When you touched the cockroach leg -- can you get the microphone for him? When you touched the cockroach leg, what did it feel like? Did you notice something?
Ahora, habrán notado algo más en los animales cuando corrían por el terreno desparejo. Mi asistente me va a ayudar con esto. Cuando tocaste la pata de la cucaracha. ¿pueden ponerle el micróono? Cuando tocaste la pata de la cucaracha, ¿qué sentiste? ¿Notaste algo?
Boy: Spiny.
Niño: espinoso.
Robert Full: It's spiny, right? It's really spiny, isn't it? It sort of hurts. Maybe we could give it to our curator and see if he'd be brave enough to touch the cockroach. (Laughter)
Robert Full: Es espinoso, ¿verdad? Es muy espinoso, ¿cierto? Como que duele. Tal vez podríamos dársela a nuestro curador y ver si es tan valiente como para tocar la cucaracha. (Risas)
Chris Anderson: Did you touch it?
Chris Anderson: ¿La tocaste?
RF: So if you look carefully at this, what you see is that they have spines and until a few weeks ago, no one knew what they did. They assumed that they were for protection and for sensory structures. We found that they're for something else -- here's a segment of that spine. They're tuned such that they easily collapse in one direction to pull the leg out from debris, but they're stiff in the other direction so they capture disparities in the surface.
RF: Entonces si la miran con atención se ve que tienen espinas y hasta hace pocas semanas nadie sabía qué hacían. Se suponía que eran para protección, estructuras sensoriales. Hallamos que siven para algo más; aquí hay un fragmento de esa espina. Están dispuestas de manera que fácilmente caen en una dirección para alejar la pata de los escombros pero queda rígida en la otra dirección para capturar salientes en la superficie.
Now crabs don't miss footholds, because they normally move on sand -- until they come to our lab. And where they have a problem with this kind of mesh, because they don't have spines. The crabs are missing spines, so they have a problem in this kind of rough terrain. But of course, we can deal with that because we can produce artificial spines. We can make spines that catch on simulated debris and collapse on removal to easily pull them out. We did that by putting these artificial spines on crabs, as you see here, and then we tested them. Do we really understand that principle of tuning? The answer is, yes! This is slowed down 20-fold, and the crab just zooms across that simulated debris. (Laughter) (Applause) A little better than nature.
Los cangrejos no necesitan puntos de apoyo porque normalmente se mueven en la arena hasta que van a nuesto laboratorio. Y tienen problemas con esta clase de malla porque no tienen espinas. A los cangrejos les faltan espinas por eso tienen problemas en estos terrenos desparejos. pero por supuesto que podemos resolver eso porque podemos producir espinas artificiales. Podemos hacer espinas que se adhieran a escombros simulados y caigan ante la remoción para retirarlas fácilmente. Lo hicimos poniendo estas espinas artificiales a cangrejos como ven aquí y luego las probamos. ¿Entendemos realmente ese principio de adaptación? La respuesta es: ¡sí! Esto está 20 veces más lento y el cangrejo sale zumbando por los escombros simulados. (Risas) (Aplausos) Un poquito mejor que la Naturaleza.
So to our blueprint, we need to add tuned spines. Now will this help us think about the design of more effective climbing robots? Well, here's RHex: RHex has trouble on rails -- on smooth rails, as you see here. So why not add a spine? My colleagues did this at U. Penn. Dan Koditschek put some steel nails -- very simple version -- on the robot, and here's RHex, now, going over those steel -- those rails. No problem! How does it do it? Let's slow it down and you can see the spines in action. Watch the leg come around, and you'll see it grab on right there. It couldn't do that before; it would just slip and get stuck and tip over. And watch again, right there -- successful.
Así, para nuestro diseño, necesitamos agregar espinas adaptadas. Ahora, ¿nos ayudará esto a pensar el diseño de robots escaladores más efectivos? Bien, este es RHex (RHex tiene problemas sobre rieles) sobre rieles lisos, como ven. Entonces, ¿por qué no agregar espinas? Mis colegas lo hicieron en la Universidad de Pensilvania. Dan Koditschek le puso uñas de acero (una versión muy simple) al robot y aquí tenemos al RHex yendo por esos rieles de acero... ¡sin problemas! ¿Cómo lo hace? Mirémoslo más lentamente para ver las espinas en acción. Miren pasar la pata y la verán adherirse justo allí. No podía hacerlo antes, se habría resbalado, atascado y caído. Y miren de nuevo, justo allí... éxito.
Now just because we have a distributed foot and spines doesn't mean you can climb vertical surfaces. This is really, really difficult. But look at this animal do it! One of the ones I'm passing around is climbing up this vertical surface that's a smooth metal plate. It's extraordinary how fast it can do it -- but if you slow it down, you see something that's quite extraordinary. It's a secret. The animal effectively climbs by slipping and look -- and doing, actually, terribly, with respect to grabbing on the surface. It looks, in fact, like it's swimming up the surface. We can actually model that behavior better as a fluid, if you look at it. The distributed foot, actually, is working more like a paddle.
Ahora bien, por sólo tener pies y espinas distribuidos no significa que se pueda escalar superficies verticales. Esto es realmente muy difícil. ¡Pero miren como lo hace este animal! Uno de los que voy pasando está escalando esta superficie vertical que es una placa de metal lisa. Es extraordinario lo rápido que puede hacerlo pero en cámara lenta puede verse algo muy extraordinario. Es un secreto. El animal efectivamente escala resbalando y miren lo hace realmente mal respecto de la adhesión a la superficie Parece, de hecho, que nada contracorriente la superficie. Podemos modelar ese comportamiento mejor como fluído, si lo miran. El pie distribuido, en realidad, funciona más como un remo.
The same is true when we looked at this lizard running on fluidized sand. Watch its feet. It's actually functioning as a paddle even though it's interacting with a surface that we normally think of as a solid. This is not different from what my former undergraduate discovered when she figured out how lizards can run on water itself. Can you use this to make a better robot? Martin Buehler did -- who's now at Boston Dynamics -- he took this idea and made RHex to be Aqua RHex. So here's RHex with paddles, now converted into an incredibly maneuverable swimming robot.
Lo mismo vale si miramos esta lagartija que corre en un lecho fluidizado. Miren sus pies. En realidad funcionan como remos si bien está interactuando con una superficie que normalmente pensamos como sólida. Esto no difiere de lo que mi antigua estudiante de licenciatura descubrió cuando ella imaginaba cómo pueden correr las lagartijas en el agua. ¿Puede usarse esto para construir mejores robots? Martin Buehler hizo (está en Boston Dynamics ahora) tomó esta idea e hizo de RHex un Aqua RHex. Así tenemos un RHex con remos ahora convertido en un robot nadador increíblemente versátil.
For rough surfaces, though, animals add claws. And you probably feel them if you grabbed it. Did you touch it?
En superficies irregulares, animales con garras. Y seguro las sienten si los tocan. ¿Las tocaron?
CA: I did.
CA: Yo lo hice.
RF: And they do really well at grabbing onto surfaces with these claws. Mark Cutkosky at Stanford University, one of my collaborators, is an extraordinary engineer who developed this technique called Shape Deposition Manufacturing, where he can imbed claws right into an artificial foot. And here's the simple version of a foot for a new robot that I'll show you in a bit. So to our blueprint, let's attach claws. Now if we look at animals, though, to be really maneuverable in all surfaces, the animals use hybrid mechanisms that include claws, and spines, and hairs, and pads, and glue, and capillary adhesion and a whole bunch of other things. These are all from different insects. There's an ant crawling up a vertical surface. Let's look at that ant.
RF: Y se adhieren muy bien a las superficies con estas garras. Mark Cutkosky de la Universidad de Stanford, colaborador mío, es un ingeniero fuera de serie que desarrolló esta técnica llamada Fabricación por Deposición de Forma que le permite incrustar garras en un pie artificial. Y aquí está una versión de un pie para un nuevo robot que les mostraré en un momento. Así, para nuestro diseño, agreguemos garras. Si miramos a los animales, para ser realmente versátil en todas las superficies, los animales usan mecanismos híbridos como son garras, espinas, pelos, almohadillas, pegamento, adhesión capilar y un montón de otras cosas. Estas son todas de diferentes insectos. Hay una hormiga arrastrándose por una superficie vertical. Miremos esa hormiga.
This is the foot of an ant. You see the hairs and the claws and this thing here. This is when its foot's in the air. Watch what happens when the foot goes onto your sandwich. You see what happens? That pad comes out. And that's where the glue is. Here from underneath is an ant foot, and when the claws don't dig in, that pad automatically comes out without the ant doing anything. It just extrudes. And this was a hard shot to get -- I think this is the shot of the ant foot on the superstrings. So it's pretty tough to do. This is what it looks like close up -- here's the ant foot, and there's the glue.
Este es el pie de una hormiga. Ven pelos, garras y esto de aquí. Esto es cuando su pie está en el aire. Miren lo que sucede cuando el pie entra en un sandwich. ¿Ven lo que sucede? Aparece esa almohadilla, donde está el pegamento. Aquí está un pie de hormiga visto desde abajo y cuando las garras no se clavan aparece la almohadilla sin que la hormiga haga nada. Simplmente sale. Y esta toma fue muy difícil... pienso que esta es la toma de la hormiga en las supercuerdas. Por eso es bastante difícil de hacer. Así se ve de cerca este es el pie de la hormiga y ese el pegamento.
And we discovered this glue may be an interesting two-phase mixture. It certainly helps it to hold on. So to our blueprint, we stick on some sticky pads. Now you might think for smooth surfaces we get inspiration here. Now we have something better here. The gecko's a really great example of nanotechnology in nature. These are its feet. They're -- almost look alien. And the secret, which they stick on with, involves their hairy toes. They can run up a surface at a meter per second, take 30 steps in that one second -- you can hardly see them. If we slow it down, they attach their feet at eight milliseconds, and detach them in 16 milliseconds. And when you watch how they detach it, it is bizarre. They peel away from the surface like you'd peel away a piece of tape. Very strange. How do they stick?
Y descubrimos que este pegamento podría ser una mezcla interesante de 2 fases. Desde luego que ayuda a sostener. Así, para nuestro diseño, peguemos algunas almohadillas adherentes. Podrían pensar que para superficies lisas nos inspiramos en esto. Ahora tenemos algo mejor aquí. La salamandra es un gran ejemplo de nanotecnología en la Naturaleza. Estos son sus pies. Son... casi parece un alien. Y el secreto que le permite adherirse involucra sus dedos peludos. Pueden recorrer una superficie a un metro por segundo 30 pasos en ese segundo... casi no se puede ver. En cámara lenta, apoyan el pie en ocho milisegundos y lo levantan en 16 milisegundos. Y cuando miran como lo levantan, es raro. Lo despegan de la superficie como si despegaran una cinta adhesiva. Muy extraño. ¿Cómo se pegan?
If you look at their feet, they have leaf-like structures called linalae with millions of hairs. And each hair has the worst case of split ends possible. It has a hundred to a thousand split ends, and that's the secret, because it allows intimate contact. The gecko has a billion of these 200-nanometer-sized split ends. And they don't stick by glue, or they don't work like Velcro, or they don't work with suction. We discovered they work by intermolecular forces alone. So to our blueprint, we split some hairs. This has inspired the design of the first self-cleaning dry adhesive -- the patent issued, we're happy to say. And here's the simplest version in nature, and here's my collaborator Ron Fearing's attempt at an artificial version of this dry adhesive made from polyurethane. And here's the first attempt to have it work on some load.
Si miran sus pies, tienen estructuras con forma de hoja llamadas linalae con millones de pelos. Y cada pelo tiene el peor caso posible de puntas rotas. Tiene de cien a mil puntas rotas y ese es el secreto porque permite contacto íntimo. La salamandra tiene mil millones de estas puntas rotas de 200 nanómetros. Y no se pegan con pegamento, ni funcionan como el velcro, ni funcionan con succión. Descubrimos que funcionan sólo por fuerzas intermoleculares. Así, para nuestro diseño, partimos algunos pelos. Esto ha inspirado el diseño del primer adhesivo seco autolimpiante patentado, nos complace decirlo. Y aquí está la versión más simple en la Naturaleza y aquí el intento de mi colaborador Ron Fearing en una versión artificial de este adhesivo seco hecho de poliuretano. Y aquí el primer intento de hacerlo funcionar con algo de carga.
There's enormous interest in this in a variety of different fields. You could think of a thousand possible uses, I'm sure. Lots of people have, and we're excited about realizing this as a product. We have imagined products; for example, this one: we imagined a bio-inspired Band-Aid, where we took the glue off the Band-Aid. We took some hairs from a molting gecko; put three rolls of them on here, and then made this Band-Aid.
Hay un enorme interés en esto en muchas campos diferentes. Pueden imaginar mil usos posibles, estoy seguro. Mucha gente lo hace y estamos entusiasmados de ver esto como un producto. Hemos imaginado productos, por ejemplo, éste: imaginamos un apósito bio-inspirado, donde quitamos el pegamento del apósito. Tomamos algunos pelos de una salamandra; pusimos tres ovillos de pelos y luego hicimos este apósito adhesivo.
This is an undergraduate volunteer -- we have 30,000 undergraduates so we can choose among them -- that's actually just a red pen mark. But it makes an incredible Band-Aid. It's aerated, it can be peeled off easily, it doesn't cause any irritation, it works underwater. I think this is an extraordinary example of how curiosity-based research -- we just wondered how they climbed up something -- can lead to things that you could never imagine. It's just an example of why we need to support curiosity-based research. Here you are, pulling off the Band-Aid.
Esta es una estudiante voluntaria tenemos 30.000 estudiantes así que podemos elegir ese es en realidad sólo un marcador rojo. Pero es un apósito adhesivo increíble. Es aireado, se despega fácilmente, no provoca irritación, funciona bajo el agua. Pienso que este es un muy buen ejemplo de cómo la investigación por curiosidad (simplemente nos preguntábamos cómo escalaban algo) puede llevar a cosas que nunca hubiéramos imaginado. Es sólo un ejemplo de por qué tenemos que apoyar la investigación por curiosidad. Aquí lo tienen, quitando el apósito adhesivo.
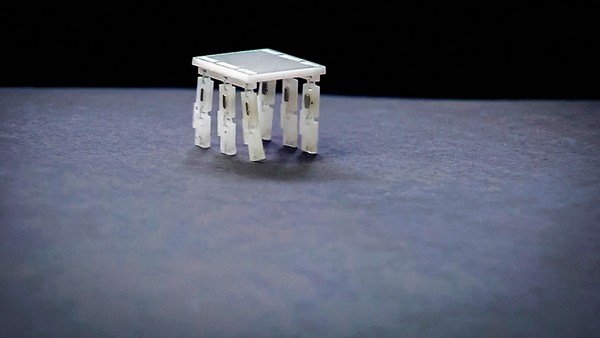
So we've redefined, now, what a foot is. The question is, can we use these secrets, then, to inspire the design of a better foot, better than one that we see in nature? Here's the new project: we're trying to create the first climbing search-and-rescue robot -- no suction or magnets -- that can only move on limited kinds of surfaces. I call the new robot RiSE, for "Robot in Scansorial Environment" -- that's a climbing environment -- and we have an extraordinary team of biologists and engineers creating this robot. And here is RiSE. It's six-legged and has a tail. Here it is on a fence and a tree. And here are RiSE's first steps on an incline. You have the audio? You can hear it go up. And here it is coming up at you, in its first steps up a wall. Now it's only using its simplest feet here, so this is very new. But we think we got the dynamics right of the robot.
Así hemos redefinido lo que es un pie. La pregunta es si, entonces, podemos usar estos secretos para inspirar el diseño de un mejor pie, mejor que el que vemos en la Naturaleza. Este es el nuevo proyecto: estamos intentando crear el primer robot trepador de búsqueda y rescate (sin succión o imanes) que puede moverse sólo en unas pocas superficies. Llamo al nuevo robot RiSE, por Robot en Entorno Escansorial (ReEE), que es un entorno empinado y tenemos un equipo extraordinario de biólogos e ingenieros creando este robot. Y aquí está el ReEE. Tiene seis patas y cola. Aquí está en una cerca y un árbol. Y aquí los primeros pasos del ReEE en una pendiente. ¿Tienen el audio? Pueden oirlo subir. Y aquí viene hacia ustedes, en su primeros pasos pared arriba. Ahora está usando sólo sus pies más simples, así que esto es muy nuevo. Pero pensamos que entendimos la dinámica del robot.
Mark Cutkosky, though, is taking it a step further. He's the one able to build this shape-deposition manufactured feet and toes. The next step is to make compliant toes, and try to add spines and claws and set it for dry adhesives. So the idea is to first get the toes and a foot right, attempt to make that climb, and ultimately put it on the robot. And that's exactly what he's done. He's built, in fact, a climbing foot-bot inspired by nature.
Mark Cutkosky está yendo un paso más allá. Es la persona capaz de constuir estos pies y dedos fabricados por deposición de forma. El próximo paso es hacer dedos acordes e intentar agregar espinas, garras y disponerlos en adhesivos secos. Así, la idea es primero conseguir los dedos y un pie intentar que trepe y finalmente colocarlo en el robot. Y eso es exactamente lo que él ha hecho. Construyó, de hecho, un pie-bot escalador inspirado por la Naturaleza.
And here's Cutkosky's and his amazing students' design. So these are tuned toes -- there are six of them, and they use the principles that I just talked about collectively for the blueprint. So this is not using any suction, any glue, and it will ultimately, when it's attached to the robot -- it's as biologically inspired as the animal -- hopefully be able to climb any kind of a surface. Here you see it, next, going up the side of a building at Stanford. It's sped up -- again, it's a foot climbing. It's not the whole robot yet, we're working on it -- now you can see how it's attaching. These tuned structures allow the spines, friction pads and ultimately the adhesive hairs to grab onto very challenging, difficult surfaces. And so they were able to get this thing -- this is now sped up 20 times -- can you imagine it trying to go up and rescue somebody at that upper floor? OK? You can visualize this now; it's not impossible. It's a very challenging task. But more to come later.
Y aquí está el diseño de Cutkosky y de sus asombrosos estudiantes. Y estos son dedos adaptados, hay seis de ellos y usan los principios de los que les hablé, colectivamente para el diseño. Entonces esto no usa succión ni pegamento y finalmente, cuando esté anexado al robot, (está tan inspirado en biología como el animal) con suerte será capaz de escalar todo tipo de superficie. Aquí lo ven, a continuación, subiendo un lado del edificio en Stanford. Está acelerado, de nuevo, es un pie escalando. Todavía no es el robot completo, estamos trabajando en eso ahora pueden ver cómo se agarra. Estas estructuras adaptadas permiten a las espinas, las almohadillas de fricción y pelos adhesivos adherirse a superficies muy desafiantes y difíciles. Y así fueron capaces de obtener esto, esto está acelerado 20 veces, ¿pueden imaginarlo intentando subir a rescatar a alguien en el piso superior? ¿bien? Pueden visualizarlo ahora, no es imposible. Es una tarea que supone un gran reto, pero hay mucho por venir.
To finish: we've gotten design secrets from nature by looking at how feet are built. We've learned we should distribute control to smart parts. Don't put it all in the brain, but put some of the control in tuned feet, legs and even body. That nature uses hybrid solutions, not a single solution, to these problems, and they're integrated and beautifully robust. And third, we believe strongly that we do not want to mimic nature but instead be inspired by biology, and use these novel principles with the best engineering solutions that are out there to make -- potentially -- something better than nature.
Para terminar: obtuvimos secretos de la Naturaleza mirando cómo están hechos los pies. Hemos aprendido que deberíamos distribuir el control a partes inteligentes. No poner todo en el cerebro sino poner algo de control en pies adaptados, en patas e incluso en el cuerpo. Que la Naturaleza usa soluciones híbridas, no una solución simple, para estos problemas; están integrados y son bellamente robustos. Y tercero, creemos firmemente que no deseamos imitar la Naturaleza sino inspirarnos en la biología y usar estos principios originales con las mejores soluciones de ingeniería existentes para hacer, potencialmente, algo mejor que la Naturaleza.
So there's a clear message: whether you care about a fundamental, basic research of really interesting, bizarre, wonderful animals, or you want to build a search-and-rescue robot that can help you in an earthquake, or to save someone in a fire, or you care about medicine, we must preserve nature's designs. Otherwise these secrets will be lost forever. Thank you.
Entonces, hay un mensaje claro: tanto si uno se preocupa por la investigación fundamental básica de animales realmente interesantes, raros y maravillosos como si se desea construir un robot de búsqueda y rescate que pueda ayudar en terremotos, o salvar a alguien de un incendio o si uno se interesa por la medicina, debemos preservar los diseños de la Naturaleza. De otro modo estos secretos se perderán para siempre. Gracias.