Stellen Sie sich einmal vor, Sie sind Student in meinem Labor. Und ich möchte, dass Sie ein biologisch inspiriertes Design schaffen. Hier ist die Aufgabe: Helfen Sie mir dabei, ein dynamisches, parameterisiertes Kontaktmodell in 3D zu bauen. Übersetzt heißt das: Können Sie mir helfen, einen Fuß zu bauen? Und das ist eine Herausforderung, bei der Sie mir helfen müssen. Die Aufgabe bringt natürlich einen Preis mit sich. Vielleicht nicht der TED Prize, aber doch ein exklusives T-Shirt aus unserem Labor. Also bitte senden Sie mir Ihre Ideen, wie man einen Fuß designt.
I want you to imagine that you're a student in my lab. What I want you to do is to create a biologically inspired design. And so here's the challenge: I want you to help me create a fully 3D, dynamic, parameterized contact model. The translation of that is, could you help me build a foot? And it is a true challenge, and I do want you to help me. Of course, in the challenge there is a prize. It's not quite the TED Prize, but it is an exclusive t-shirt from our lab. So please send me your ideas about how to design a foot.
Was gehört zum Design eines Fußes dazu? Zuerst müssen wir wissen, was ein Fuß ist. Im Wörterbuch steht: "Die untere Extremität eines Beins, das beim Stehen oder Laufen in direktem Bodenkontakt steht." Das ist die traditionelle Definition. Aber was gehört zu einer richtigen Recherche darüber? Wir müssen schauen, was in der bekannten Literatur über Füße steht. Also wenden wir uns der Literatur zu. (Lachen)
Now if we want to design a foot, what do we have to do? We have to first know what a foot is. If we go to the dictionary, it says, "It's the lower extremity of a leg that is in direct contact with the ground in standing or walking" That's the traditional definition. But if you wanted to really do research, what do you have to do? You have to go to the literature and look up what's known about feet. So you go to the literature. (Laughter)
Vielleicht ist Ihnen diese Art Literatur bekannt. Problematisch ist aber, dass es viele, viele Füße gibt. Wie macht man das? Wir müssen alle Füße untersuchen und die Prinzipien ihrer Funktionsweise herausarbeiten. Und im nächsten Video sollen Sie mir dabei helfen. Achten Sie in diesem Video auf Gemeinsamkeiten und denken Sie über Experimente nach, mithilfe derer Sie die Funktionsweise eines Fußes verstehen können.
Maybe you're familiar with this literature. The problem is, there are many, many feet. How do you do this? You need to survey all feet and extract the principles of how they work. And I want you to help me do that in this next clip. As you see this clip, look for principles, and also think about experiments that you might design in order to understand how a foot works.
Sehen Sie Gemeinsamkeiten? Grundprinzipien? Was würden Sie tun? Welche Experimente würden Sie durchführen? Wow. (Beifall) Durch unsere Forschung zur Biomechanik der Fortbewegung von Tieren konnten wir einen Bauplan eines Fußes erstellen. Den Entwurf hat die Natur inspiriert, er ist aber keine Kopie der soeben gesehenen spezifischen Füße, sondern eine Synthese der Geheimnisse vieler, vieler Füße.
See any common themes? Principles? What would you do? What experiments would you run? Wow. (Applause) Our research on the biomechanics of animal locomotion has allowed us to make a blueprint for a foot. It's a design inspired by nature, but it's not a copy of any specific foot you just looked at, but it's a synthesis of the secrets of many, many feet.
Jetzt stellt sich heraus, dass Tiere überall hin können. Sie können sich auf sehr verschiedenen Untergründen fortbewegen – sie variieren in der Kontaktwahrscheinlichkeit, der Bewegung der Oberfläche und den gegebenen Auftrittsmöglichkeiten. Wenn wir untersuchen, wie ein Fuß funktioniert, müssen wir diese Oberflächen oder Hindernisse simulieren. Dabei führten wir ein neues Experiment durch: Wir ließen ein Tier – hier eine Grasspinne – über eine Oberfläche laufen, von der 99 % der Kontaktfläche entfernt worden waren. Aber das verringerte die Geschwindigkeit des Tiers kein bisschen. Es läuft immer noch mit einer Geschwindigkeit von fast 500 km/h.
Now it turns out that animals can go anywhere. They can locomote on substrates that vary as you saw -- in the probability of contact, the movement of that surface and the type of footholds that are present. If you want to study how a foot works, we're going to have to simulate those surfaces, or simulate that debris. When we did that, here's a new experiment that we did: we put an animal and had it run -- this grass spider -- on a surface with 99 percent of the contact area removed. But it didn't even slow down the animal. It's still running at the human equivalent of 300 miles per hour.
Wie gelang ihm das nur? Schauen Sie genauer hin. Verlangsamen wir die Bewegung 50-mal, sehen wir, wie das Bein das Hindernis berührt. Das Bein handelt wie ein Fuß. Und das Tier lässt andere Teile seines Beins viel öfter als den traditionell definierten Fuß Kontakt herstellen. Der Fuß ist über das ganze Bein verteilt. Hier ist ein anderes Experiment, wo der Fuß einer Kakerlake entfernt wird. Ich lasse ein paar Kakerlaken herumgehen. Schauen Sie sich ihre Füße an. Ohne einen Fuß tut sie dies. Sie verlangsamt sich noch nicht einmal. Sie kann ohne dieses Segment die Geschwindigkeit beibehalten. Kein Problem für die Schabe – die Füße wachsen auch wieder nach. Wie stellen sie das an? Schauen Sie genau hin: Einhundertfach verlangsamt sehen wir nun, was sie mit ihrem Bein anstellt. Und wieder fungiert es als erweiterter Fuß – sehr effektiv.
Now how could it do that? Well, look more carefully. When we slow it down 50 times we see how the leg is hitting that simulated debris. The leg is acting as a foot. And in fact, the animal contacts other parts of its leg more frequently than the traditionally defined foot. The foot is distributed along the whole leg. You can do another experiment where you can take a cockroach with a foot, and you can remove its foot. I'm passing some cockroaches around. Take a look at their feet. Without a foot, here's what it does. It doesn't even slow down. It can run the same speed without even that segment. No problem for the cockroach -- they can grow them back, if you care. How do they do it? Look carefully: this is slowed down 100 times, and watch what it's doing with the rest of its leg. It's acting, again, as a distributed foot -- very effective.
Unsere Frage war aber: Wie allgemein ist ein erweiterter Fuß? Bei dem nächsten Verhalten waren wir beim ersten Sehen einfach nur verblüfft. Journalisten, das ist nicht für die Öffentlichkeit bestimmt. Schauen Sie mal, was das ist! Das ist ein zweifüßiger Oktopus, der als rollende Kokosnus verkleidet ist. Er wurde von Christina Huffard entdeckt, und von Sea Studios gefilmt, genau hier aus Monterey.
Now, the question we had is, how general is a distributed foot? And the next behavior I'll show you of this animal just stunned us the first time that we saw it. Journalists, this is off the record; it's embargoed. Take a look at what that is! That's a bipedal octopus that's disguised as a rolling coconut. It was discovered by Christina Huffard and filmed by Sea Studios, right here from Monterey.
Wir haben auch eine andere Spezies des zweifüßigen Oktopus entdeckt. Der hier tarnt sich als treibende Algen. Er läuft auf zwei Beinen und hält die anderen Arme hoch, damit er nicht gesehen wird. (Beifall) Und schauen Sie, was er tut, um den Fuß über schwieriges Terrain zu bewegen. Dieser wunderbare erweiterte Fuß lässt die Hindernisse wie gar keine erscheinen – wahrhaftig außergewöhnlich.
We've also described another species of bipedal octopus. This one disguises itself as floating algae. It walks on two legs and it holds the other arms up in the air so that it can't be seen. (Applause) And look what it does with its foot to get over challenging terrain. It uses that beautiful distributed foot to make it as if those obstacles are not even there -- truly extraordinary.
1951 zeichnete Escher dieses Bild. Er dachte, er hätte Tier-Fantasy gezeichnet. Aber da bekanntlich die Kunst das Leben imitiert, stellt sich heraus, dass die Natur vor drei Millionen Jahren das nächste Tier entwickelte. Es ist ein Shrimp-ähnliches Tier namens Stomatopode. So bewegt es sich an den Stränden von Panama: Es rollt regelrecht und kann sogar bergauf rollen. Es ist der ultimative erweiterte Fuß: Der gesamte Körper agiert in diesem Fall als Fuß.
In 1951, Escher made this drawing. He thought he created an animal fantasy. But we know that art imitates life, and it turns out nature, three million years ago, evolved the next animal. It's a shrimp-like animal called the stomatopod, and here's how it moves on the beaches of Panama: it actually rolls, and it can even roll uphill. It's the ultimate distributed foot: its whole body in this case is acting like its foot.
Wenn wir dann unserem Bauplan das erste wichtige Feature geben wollen, dann ist das also erweiterter Fußkontakt. Nicht nur mit dem traditionellen Fuß, auch mit dem Bein und selbst mit dem Körper. Kann uns das dabei helfen, neuartige Roboter zu entwerfen? Wir sorgten für die biologische Inspiration dieses Roboters namens RHex, der von diesen fantastischen Ingenieuren in den letzten paar Jahren gebaut wurde. Der Fuß von RHex fing zunächst ganz einfach an, mit der Zeit wurde an ihm herumgeschraubt und schließlich wurde es dieser HalbkreIs. Wieso das? Das Video zeigt es Ihnen. Schauen Sie, wo der Roboter auf diesem schwierigen Untergrund Kontakt mit seinem Bein herstellt. Sie sehen, dass er den Halbkreisfuß als erweiterten Fuß einsetzt. Schauen Sie, wie er hier läuft. Sie können es bei dem Hindernis gut sehen. Außergewöhnlich. Kein Tasten, alle Kontrollen sind direkt in die Beine eingebaut. Sehr einfach, aber schön.
So, if we want to then, to our blueprint, add the first important feature, we want to add distributed foot contact. Not just with the traditional foot, but also the leg, and even of the body. Can this help us inspire the design of novel robots? We biologically inspired this robot, named RHex, built by these extraordinary engineers over the last few years. RHex's foot started off to be quite simple, then it got tuned over time, and ultimately resulted in this half circle. Why is that? The video will show you. Watch where the robot, now, contacts its leg in order to deal with this very difficult terrain. What you'll see, in fact, is that it's using that half circle leg as a distributed foot. Watch it go over this. You can see it here well on this debris. Extraordinary. No sensing, all the control is built right into the tuned legs. Really simple, but beautiful.
Vielleicht ist Ihnen an den Tieren noch etwas aufgefallen, während Sie den unebenen Boden überquerten. Und hier hilft mein Assistent. Als du das Bein der Schabe angefasst hast – können wir ihm ein Mikro geben? Als du das Bein der Schabe angefasst hast, wie fühlte sich das an? Ist dir etwas aufgefallen?
Now, you might have noticed something else about the animals when they were running over the rough terrain. And my assistant's going to help me here. When you touched the cockroach leg -- can you get the microphone for him? When you touched the cockroach leg, what did it feel like? Did you notice something?
Junge: Stachelig.
Boy: Spiny.
Robert Full: Es ist stachelig, nicht? Sehr stachelig, oder? Es tut sogar weh. Vielleicht können wir es unserem Kurator geben, vielleicht hat er den Mut, die Schabe anzufassen. (Lachen)
Robert Full: It's spiny, right? It's really spiny, isn't it? It sort of hurts. Maybe we could give it to our curator and see if he'd be brave enough to touch the cockroach. (Laughter)
Chris Anderson: Hast du's angefasst?
Chris Anderson: Did you touch it?
Fell: Schauen Sie sich das Bein genau an, Sie sehen da die Stacheln, und bis vor ein paar Wochen wusste niemand, wofür sie da sind. Sie nahmen an, sie existierten zum Schutz und wegen der Sensorik. Sie sind aber für etwas anderes – hier ein Segment des Stachels. Sie sind so eingestellt, dass sie leicht in eine Richtung zusammenklappen, um das Bein aus dem Geröll zu ziehen, aber in die andere Richtung sind sie steif, so dass sie Unebenheiten auffangen können.
RF: So if you look carefully at this, what you see is that they have spines and until a few weeks ago, no one knew what they did. They assumed that they were for protection and for sensory structures. We found that they're for something else -- here's a segment of that spine. They're tuned such that they easily collapse in one direction to pull the leg out from debris, but they're stiff in the other direction so they capture disparities in the surface.
Krabben treten nie daneben, weil sie sich normalerweise auf Sand bewegen – bis sie in unser Labor kommen. Und dort haben sie ein Problem mit so einem Gitter, denn ihnen fehlen die Stacheln. Die Krabben haben keine Stacheln, also kommen sie auf unebenem Terrain weniger gut klar. Aber natürlich können wir damit umgehen, denn wir können künstliche Stacheln herstellen. Wir können Stacheln herstellen, die auf simulierten Hindernissen greifen und zur leichten Entfernung zusammenklappen. Wir versahen die Krabben mit diesen künstlichen Stacheln wie Sie hier sehen, und testeten sie dann. Verstehen wir wirklich das Prinzip des Aufmotzens? Oh ja! Das ist 20-fach verlangsamt und die Krabbe rast regelrecht über das Hindernis hinweg. (Lachen) (Beifall) Ein bisschen besser als die Natur.
Now crabs don't miss footholds, because they normally move on sand -- until they come to our lab. And where they have a problem with this kind of mesh, because they don't have spines. The crabs are missing spines, so they have a problem in this kind of rough terrain. But of course, we can deal with that because we can produce artificial spines. We can make spines that catch on simulated debris and collapse on removal to easily pull them out. We did that by putting these artificial spines on crabs, as you see here, and then we tested them. Do we really understand that principle of tuning? The answer is, yes! This is slowed down 20-fold, and the crab just zooms across that simulated debris. (Laughter) (Applause) A little better than nature.
Wir mussten also unseren Bauplänen solche Stacheln geben. Hilft uns das jetzt beim Entwerfen effektiverer kletternder Roboter? Hier ist RHex: RHex hat auf Schienen Probleme – auf glatten Schienen wie denen hier. Geben wir ihm Stacheln! So geschah es an der Universität von Pennsylvania. Dan Koditschek versah den Roboter mit Stahlnägeln – einer sehr einfachen Version – und hier sehen wir RHex über die Schienen gehen! Kein Problem! Wie tut er das? Verlangsamen wir, um die Stacheln in Aktion zu sehen. Hier kommt das Bein an, und es hält sich genau dort fest. Vorher konnte es das nicht, es rutschte einfach aus, steckte fest und fiel um. Und hier schon wieder – erfolgreich.
So to our blueprint, we need to add tuned spines. Now will this help us think about the design of more effective climbing robots? Well, here's RHex: RHex has trouble on rails -- on smooth rails, as you see here. So why not add a spine? My colleagues did this at U. Penn. Dan Koditschek put some steel nails -- very simple version -- on the robot, and here's RHex, now, going over those steel -- those rails. No problem! How does it do it? Let's slow it down and you can see the spines in action. Watch the leg come around, and you'll see it grab on right there. It couldn't do that before; it would just slip and get stuck and tip over. And watch again, right there -- successful.
Nur weil wir jetzt einen erweiterten Fuß und Stacheln haben, kann man noch lange nicht vertikale Oberflächen erklimmen. Das ist echt, echt schwer. Aber dieses Tier kann es! Eines von den Tieren, die ich herumreiche, kann diese vertikale glatte Metallplatte hochklettern. Und es tut das in einem verblüffenden Tempo – Aber wenn man es verlangsamt, sehen wir etwas Beeindruckendes. Ein Geheimnis. Das Tier klettert, indem es ausrutscht und es kann eigentlich überhaupt nicht gut die Oberfläche greifen. Es sieht eher so aus, als schwömme es die Oberfläche hoch. Wir können dieses Verhalten besser als Flüssigkeit nachbauen. Der erweiterte Fuß funkioniert eher wie ein Paddel.
Now just because we have a distributed foot and spines doesn't mean you can climb vertical surfaces. This is really, really difficult. But look at this animal do it! One of the ones I'm passing around is climbing up this vertical surface that's a smooth metal plate. It's extraordinary how fast it can do it -- but if you slow it down, you see something that's quite extraordinary. It's a secret. The animal effectively climbs by slipping and look -- and doing, actually, terribly, with respect to grabbing on the surface. It looks, in fact, like it's swimming up the surface. We can actually model that behavior better as a fluid, if you look at it. The distributed foot, actually, is working more like a paddle.
Dasselbe gilt bei dieser Eidechse, die über verflüssigten Sand läuft. Schauen Sie auf die Füße. Sie fungieren als Paddel, obwohl sie mit einer Oberfläche interagieren, die wir eigentlich für fest halten. Das unterscheidet sich nicht von den Entdeckungen meiner früheren Studentin, die herausfand, wie Eidechsen auf dem Wasser selbst laufen. Können wir das für bessere Roboter verwenden? Martin Buehler – nun bei Boston Dynamics – gelang es, er nahm diese Idee und verwandelte RHex in den Aqua RHex. Hier ist RHex mit Paddeln, jetzt in einen unglaublich manövrierfähigen schwimmenden Roboter umgewandelt.
The same is true when we looked at this lizard running on fluidized sand. Watch its feet. It's actually functioning as a paddle even though it's interacting with a surface that we normally think of as a solid. This is not different from what my former undergraduate discovered when she figured out how lizards can run on water itself. Can you use this to make a better robot? Martin Buehler did -- who's now at Boston Dynamics -- he took this idea and made RHex to be Aqua RHex. So here's RHex with paddles, now converted into an incredibly maneuverable swimming robot.
Für unebene Oberflächen jedoch haben Tiere Klauen. Und wahrscheinlich spüren Sie die, wenn Sie das angefasst haben. Hast du's angefasst?
For rough surfaces, though, animals add claws. And you probably feel them if you grabbed it. Did you touch it?
Anderson: Hab ich.
CA: I did.
Fell: Und sie können sich mit diesen Klauen sehr gut an Oberflächen festhalten. Mark Cutkosky an Stanford, einer meiner Partner, ist ein außergewöhnlicher Ingenieur, der eine Technik namens Shape Deposition Manufacturing (etwa: "Formanreicherung") entwickelte, wo er Klauen direkt in einen künstlichen Fuß einbetten kann. Und hier ist eine einfache Version eines Fußes für einen neuen Roboter, den ich Ihnen gleich zeige. Fügen wir unserem Bauplan also Klauen hinzu. Die Tiere, die wirklich gut auf allen Oberflächen manövrieren können, verwenden Hybridmechanismen, die Klauen und Stacheln, Härchen und Ballen, Kleber und kapillare Adhäsion einsetzen, und noch eine Menge anderer Dinge. Die hier sind alle von unterschiedlichen Insekten. Hier krabbelt eine Ameise eine senkrechte Oberfläche hoch. Schauen wir sie uns an.
RF: And they do really well at grabbing onto surfaces with these claws. Mark Cutkosky at Stanford University, one of my collaborators, is an extraordinary engineer who developed this technique called Shape Deposition Manufacturing, where he can imbed claws right into an artificial foot. And here's the simple version of a foot for a new robot that I'll show you in a bit. So to our blueprint, let's attach claws. Now if we look at animals, though, to be really maneuverable in all surfaces, the animals use hybrid mechanisms that include claws, and spines, and hairs, and pads, and glue, and capillary adhesion and a whole bunch of other things. These are all from different insects. There's an ant crawling up a vertical surface. Let's look at that ant.
Das ist der Fuß der Ameise. Die Härchen und Klauen und das Ding hier sind sichtbar. Das passiert, wenn sein Fuß in der Luft ist. Schauen Sie was passiert, wenn der Fuß auf Ihr Sandwich gerät. Haben Sie's gesehen? Der Ballen kommt heraus. Und dort ist der Kleber. Hier sehen wir einen Ameisenfuß von unten, und wenn die Klauen sich nicht eingraben, kommt der Ballen ohne Zutun der Ameise heraus. Er fährt sich einfach aus. Diese Aufnahme war echt schwer – das ist der Ameisenfuß auf Bindfäden. War also ganz schön schwer. So sieht es von Nahem aus – hier ist der Ameisenfuß und hier der Kleber.
This is the foot of an ant. You see the hairs and the claws and this thing here. This is when its foot's in the air. Watch what happens when the foot goes onto your sandwich. You see what happens? That pad comes out. And that's where the glue is. Here from underneath is an ant foot, and when the claws don't dig in, that pad automatically comes out without the ant doing anything. It just extrudes. And this was a hard shot to get -- I think this is the shot of the ant foot on the superstrings. So it's pretty tough to do. This is what it looks like close up -- here's the ant foot, and there's the glue.
Und dieser Kleber entpuppt sich als interessanter Zwei-Komponenten-Mix. Das hilft ihr wirklich beim Festhalten. In unseren Bauplan fügen wir also klebrige Ballen ein. Daraus könnte man jetzt vielleicht für glatte Oberflächen Inspiration schöpfen. Wir haben hier aber etwas besseres. Der Gecko ist ein großartiges Beispiel von Nanotechnologie in der Natur. Hier sind seine Füße. Sie sehen fast wie von Außerirdischen aus. Und das Geheimnis, was sie haften lässt, sind ihre haarigen Zehen. Sie können mit 1 m/s eine Oberfläche emporlaufen, 30 Schritte in dieser einen Sekunde machen – man kann sie kaum sehen. Wenn wir das nun verlangsamen, stellen ihre Füße in 8 ms Kontakt her und lösen die Verbindung in 16 ms. Und der Prozess des Ablösens ist bizarr. Sie ziehen sie von der Oberfläche ab wie man ein Stück Klebeband abziehen würde. Sehr seltsam. Wie haften sie nur?
And we discovered this glue may be an interesting two-phase mixture. It certainly helps it to hold on. So to our blueprint, we stick on some sticky pads. Now you might think for smooth surfaces we get inspiration here. Now we have something better here. The gecko's a really great example of nanotechnology in nature. These are its feet. They're -- almost look alien. And the secret, which they stick on with, involves their hairy toes. They can run up a surface at a meter per second, take 30 steps in that one second -- you can hardly see them. If we slow it down, they attach their feet at eight milliseconds, and detach them in 16 milliseconds. And when you watch how they detach it, it is bizarre. They peel away from the surface like you'd peel away a piece of tape. Very strange. How do they stick?
Schauen wir uns ihre Füße an: blattförmige Lamellen mit Millionen von Haaren. Und jedes Haar hat furchtbaren Spliss. Es hat hundert bis tausend gespaltene Enden, und das ist das Geheimnis, es lässt intimen Kontakt zu. Der Gecko hat eine Milliarde dieser Härchen von 200 nm Größe. Und diese haften nicht mit Klebstoff, sie funktionieren nicht wie ein Klettverschluss und nicht wie Saugnäpfe. Wir entdeckten, dass sie allein durch intermolekulare Kräfte funktionieren. In unserem Bauplan spalteten wir also ein paar Haare. Das hat das Design des ersten selbstreinigen Trockenklebers inspiriert – und ich darf verkünden, dass das Patent ausgestellt ist. Hier ist die einfachste Version in der Natur, und hier versucht sich mein Partner Ron Fearing an einer künstlichen Version dieses Trockenklebers aus Polyurethan. Und hier ist mein erster Versuch, ihn zu belasten.
If you look at their feet, they have leaf-like structures called linalae with millions of hairs. And each hair has the worst case of split ends possible. It has a hundred to a thousand split ends, and that's the secret, because it allows intimate contact. The gecko has a billion of these 200-nanometer-sized split ends. And they don't stick by glue, or they don't work like Velcro, or they don't work with suction. We discovered they work by intermolecular forces alone. So to our blueprint, we split some hairs. This has inspired the design of the first self-cleaning dry adhesive -- the patent issued, we're happy to say. And here's the simplest version in nature, and here's my collaborator Ron Fearing's attempt at an artificial version of this dry adhesive made from polyurethane. And here's the first attempt to have it work on some load.
Eine Reihe unterschiedlicher Gebiete interessiert sich sehr dafür. Es gäbe dafür tausend verschiedene Anwendungen. Viele haben das schon erkannt, und wir sind stolz, dies als Produkt umzusetzen. Wir haben Produkte erdacht, zum Beispiel dieses: Wir haben uns ein biologisch inspiriertes Pflaster erdacht, ein Pflaster ohne Kleber. Wir nahmen ein paar Härchen von einem sich häutenden Gecko, pappten hier drei Rollen davon daran und schufen dieses Pflaster.
There's enormous interest in this in a variety of different fields. You could think of a thousand possible uses, I'm sure. Lots of people have, and we're excited about realizing this as a product. We have imagined products; for example, this one: we imagined a bio-inspired Band-Aid, where we took the glue off the Band-Aid. We took some hairs from a molting gecko; put three rolls of them on here, and then made this Band-Aid.
Das ist ein studentischer Freiwilliger – wir können aus einem Pool von 30.000 Erststudenten wählen – das ist eigentlich nur von einem roten Stift. Aber es ist ein unglaubliches Pflaster. Es wird belüftet, man kann es leicht abziehen, es verursacht keine Reizungen und ist wasserfest. Das ist ein außerordentliches Beispiel dafür, wie auf Neugier basierte Forschung – wir wollten nur wissen, wie sie an etwas hochklettern – zu Dingen führen kann, die man sich nicht vorstellen konnte. Das ist nur ein Beispiel, warum wir Forschung aus Neugier unterstützen müssen. Hier ziehen wir das Pflaster ab.
This is an undergraduate volunteer -- we have 30,000 undergraduates so we can choose among them -- that's actually just a red pen mark. But it makes an incredible Band-Aid. It's aerated, it can be peeled off easily, it doesn't cause any irritation, it works underwater. I think this is an extraordinary example of how curiosity-based research -- we just wondered how they climbed up something -- can lead to things that you could never imagine. It's just an example of why we need to support curiosity-based research. Here you are, pulling off the Band-Aid.
Wir haben also jetzt umdefiniert, was ein Fuß ist. Die Frage ist, ob wir diese Geheimnisse nutzen können, um das Design eines besseren Fußes zu inspirieren, besser als das Design der Natur? Hier ist das nächste Projekt: Wir versuchen uns am ersten kletternden Such- und Berge-Roboter – ohne Saugnäpfe oder Magneten – der sich nur auf einer begrenzten Auswahl von Oberflächen bewegen kann. Ich nenne ihn RiSE: "Roboter in Scan-sorischer Umgebung" – eine Kletterumgebung also – und ein außergewöhnliches Team von Biologen und Ingenieuren arbeitet an diesem Roboter. Und hier ist RiSE. Sechsbeinig mit Schwanz. Hier ist er auf einem Zaun und einem Baum. Hier sind RiSEs erste Schritte auf einer Schrägung. Gibt es auch Audio? Man kann es klettern hören. Und hier kommt es auf uns zu, die ersten Schritte eine Wand hinauf. Hier verwendet er nur seine einfachsten Füße, das ist also sehr neu. Aber wir haben die Dynamik für ihn ganz gut verstanden.
So we've redefined, now, what a foot is. The question is, can we use these secrets, then, to inspire the design of a better foot, better than one that we see in nature? Here's the new project: we're trying to create the first climbing search-and-rescue robot -- no suction or magnets -- that can only move on limited kinds of surfaces. I call the new robot RiSE, for "Robot in Scansorial Environment" -- that's a climbing environment -- and we have an extraordinary team of biologists and engineers creating this robot. And here is RiSE. It's six-legged and has a tail. Here it is on a fence and a tree. And here are RiSE's first steps on an incline. You have the audio? You can hear it go up. And here it is coming up at you, in its first steps up a wall. Now it's only using its simplest feet here, so this is very new. But we think we got the dynamics right of the robot.
Mark Cutkosky bringt das ganze noch einen Schritt weiter. Er kann Füße und Zehen per Shape Deposition Manufacturing herstellen. Im nächsten Schritt kommen passende Zehen und das Befestigen von Stacheln und Klauen und trockende Haftmittel. Zuerst sollen also die Zehen und der Fuß funktionieren, dann wird der Aufstieg versucht und am Ende der Roboter gebaut. Und genau das hat er getan. Er hat quasi einen von der Natur inspirierten Fuß-boter gebaut.
Mark Cutkosky, though, is taking it a step further. He's the one able to build this shape-deposition manufactured feet and toes. The next step is to make compliant toes, and try to add spines and claws and set it for dry adhesives. So the idea is to first get the toes and a foot right, attempt to make that climb, and ultimately put it on the robot. And that's exactly what he's done. He's built, in fact, a climbing foot-bot inspired by nature.
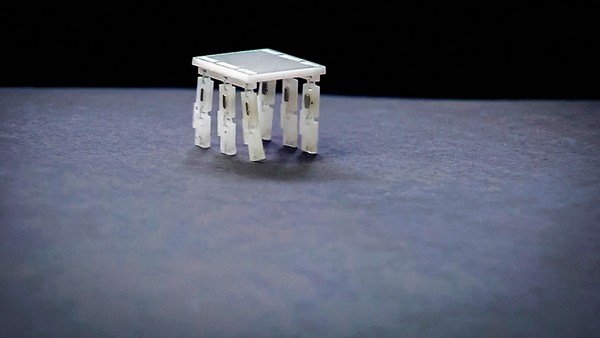
Und hier ist das Design von Cutkosky und seinen großartigen Schülern. Hier sind die aufgemotzten Zehen – es gibt sechs, und sie alle verwenden die Prinzipien, die ich beim Bauplan erklärt habe. Hier werden also keine Saugnäpfe, kein Kleber verwendet, und wenn sie am Roboter befestigt sind – der ist so biologisch inspiriert wie das Tier – dann kann er hoffentlich jede Oberfläche emporklettern. Hier sehen Sie es an der Seite eines Stanford-Gebäudes hochklettern. Es ist beschleunigt – wie gesagt, es ist ein kletternder Fuß. Es ist noch nicht der ganze Roboter. Wir arbeiten dran! Hier können Sie sehen, wie es Kontakt herstellt. Diese filigranen Strukturen erlauben es den Stacheln, Polstern und den Hafthärchen, sich an sehr herausfordernden, schwierigen Oberflächen festzuhalten. Sie konnten dieses Ding also – das ist ein 20-faches Zeitraffer – stellen Sie sich vor, wie es hochklettert und jemanden aus dem oberen Stockwerk rettet! Ds können Sie sich jetzt vorstellen. Es ist nicht unmöglich. Das ist eine große Herausforderung. Aber das ist nur der Anfang.
And here's Cutkosky's and his amazing students' design. So these are tuned toes -- there are six of them, and they use the principles that I just talked about collectively for the blueprint. So this is not using any suction, any glue, and it will ultimately, when it's attached to the robot -- it's as biologically inspired as the animal -- hopefully be able to climb any kind of a surface. Here you see it, next, going up the side of a building at Stanford. It's sped up -- again, it's a foot climbing. It's not the whole robot yet, we're working on it -- now you can see how it's attaching. These tuned structures allow the spines, friction pads and ultimately the adhesive hairs to grab onto very challenging, difficult surfaces. And so they were able to get this thing -- this is now sped up 20 times -- can you imagine it trying to go up and rescue somebody at that upper floor? OK? You can visualize this now; it's not impossible. It's a very challenging task. But more to come later.
Wir haben der Natur Design-Geheimnisse entlockt, indem wir uns den Bau von Füßen angeschaut haben. Wir haben gelernt, dass wir die Kontrolle auf kluge Teile verteilen sollten. Nicht alles in das Gehirn, sondern einen Teil der Kontrolle in aufgepeppte Füße, Beine und sogar Körper. Die Natur verwendet Hybridlösungen, nicht eine einzelne, für diese Probleme, und sie sind integriert und wunderbar robust. Und drittens glauben wir, dass wir die Natur nicht imitieren, sondern von der Biologie inspiriert werden wollen, und diese neuen Prinzipien mit den besten technischen Möglichkeiten verbinden wollen, um – möglicherweise – etwas besseres als die Natur zu schaffen.
To finish: we've gotten design secrets from nature by looking at how feet are built. We've learned we should distribute control to smart parts. Don't put it all in the brain, but put some of the control in tuned feet, legs and even body. That nature uses hybrid solutions, not a single solution, to these problems, and they're integrated and beautifully robust. And third, we believe strongly that we do not want to mimic nature but instead be inspired by biology, and use these novel principles with the best engineering solutions that are out there to make -- potentially -- something better than nature.
Die Botschaft ist also deutlich: Ob man sich für fundamentale, tiefe Forschung interessiert oder für sehr interessante, bizarre, wunderbare Tiere, oder ob man einen Such- und Berge-Roboter bauen möchte, der in einem Erdbeben hilft oder jemanden aus einem Feuer rettet, oder ob man sich für Medizin interessiert, wir müssen die Baupläne der Natur retten. Sonst sind die Geheimnisse für immer verloren. Danke.
So there's a clear message: whether you care about a fundamental, basic research of really interesting, bizarre, wonderful animals, or you want to build a search-and-rescue robot that can help you in an earthquake, or to save someone in a fire, or you care about medicine, we must preserve nature's designs. Otherwise these secrets will be lost forever. Thank you.