Jeg vil have dig til at forestille dig, at du er en elev i mit laboratorie. Jeg vil have dig til at skabe et biologisk inspireret design. Og her er udfordringen: Jeg vil have du hjælper mig med at skabe en fuld 3D, dynamisk, parameteriserede kontakt model. Oversættelsen af det er; kan du hjælpe mig med at bygge en fod? Og det er en sand udfordring, og jeg vil have din hjælp. Selvfølgelig er der en præmie i udfordringen. Det er ikke helt en "TED Prize", men det er er en eksklusiv t-shirt fra vores laboratorie. Så send endeligt jeres idéer ind om hvordan man designer en fod.
I want you to imagine that you're a student in my lab. What I want you to do is to create a biologically inspired design. And so here's the challenge: I want you to help me create a fully 3D, dynamic, parameterized contact model. The translation of that is, could you help me build a foot? And it is a true challenge, and I do want you to help me. Of course, in the challenge there is a prize. It's not quite the TED Prize, but it is an exclusive t-shirt from our lab. So please send me your ideas about how to design a foot.
Hvis vi gerne vil lave en fod, hvad skal vi så gøre? Først skal vi vide hvad en fod er. I ordbogen står der: "Det er et lavere legeme af et ben der er i direkte kontakt med jorden når man står eller går." Det er den traditionelle definition. Men hvis du virkeligt ville forske, hvad gør du så? Du skal ty til litturaturen og slå op under hvad der er kendt om fødder. Så du går til litturaturen. (Latter)
Now if we want to design a foot, what do we have to do? We have to first know what a foot is. If we go to the dictionary, it says, "It's the lower extremity of a leg that is in direct contact with the ground in standing or walking" That's the traditional definition. But if you wanted to really do research, what do you have to do? You have to go to the literature and look up what's known about feet. So you go to the literature. (Laughter)
Måske kender du denne litturatur. Problemet er, at der er mange, mange fødder. Hvordan griber man det an? Du bliver nødt til at undersøge alle fødder og udtrække deres principper. Og jeg vil gerne have i hjælper mig i det næste klip. Når du ser dette klip, så hold øje med principper, og tænk over hvilke eksperimenter du ville lave for bedre at forstå hvordan en fod virker.
Maybe you're familiar with this literature. The problem is, there are many, many feet. How do you do this? You need to survey all feet and extract the principles of how they work. And I want you to help me do that in this next clip. As you see this clip, look for principles, and also think about experiments that you might design in order to understand how a foot works.
Ser du nogle ens temaer? Principper? Hvad ville du gøre? Hvilke eksperimenter ville du lave? Wow. (Bifald) Vores forskning omkring biomekaniken bag dyrenes fremdrift har gjort det muligt at lave en byggeplan bag en fod. Det er et design inspireret af naturen, men det er ikke en kopi af en bestemt fod vi har set, det er en sammenblanding af hemmelighederne bag mange, mange fødder.
See any common themes? Principles? What would you do? What experiments would you run? Wow. (Applause) Our research on the biomechanics of animal locomotion has allowed us to make a blueprint for a foot. It's a design inspired by nature, but it's not a copy of any specific foot you just looked at, but it's a synthesis of the secrets of many, many feet.
Det viser sig nu, at dyr kan gå overalt. De kan komme frem på overflade typer der varierer som du så -- sandsynligheden for kontakt, bevægelsen af overfladen og det gældende type fodfæste. Hvis du vil studere hvordan en fod virker, bliver du nødt til at simulere de forskellige overflader. Her er et nyt eksperiment vi lavede: Vi satte et dyr og fik det til at løbe - denne græs edderkop -- på en overflade med 99 procent af kontaktfladen fjernet. Men det sænkede slet ikke dyret. Den løber stadig med en fart svarende til 480 km/t for mennesker.
Now it turns out that animals can go anywhere. They can locomote on substrates that vary as you saw -- in the probability of contact, the movement of that surface and the type of footholds that are present. If you want to study how a foot works, we're going to have to simulate those surfaces, or simulate that debris. When we did that, here's a new experiment that we did: we put an animal and had it run -- this grass spider -- on a surface with 99 percent of the contact area removed. But it didn't even slow down the animal. It's still running at the human equivalent of 300 miles per hour.
Hvordan kan den det? Prøv at se nøje efter. Når vi sætter farten ned 50 gange, ser vi hvordan benet rammer de simulerede forhindringer. Benet agerer som en fod. Faktisk har andre dele af benet kontakt mere hyppigt end den traditionelt definerede fod. Foden er fordelt langs hele benet. Du kan lave et andet eksperiment hvor du tager en kakerlak med en fod, og du fjerner denne fod. Jeg sender nogle kakerlakker rundt. Tag et kig på deres fødder. Sådan gør den uden en fod. Den sænker ikke engang farten. Den kan løbe med den samme fart uden det segment. Det gør ikke noget for kakerlakken -- de kan gro dem tilbage. Hvordan gør de det? Se nøje efter: Dette er sat ned i fart 100 gange, og se hvad den gør med resten af benet. Det agerer, igen, som en fordelt fod. Meget effektivt.
Now how could it do that? Well, look more carefully. When we slow it down 50 times we see how the leg is hitting that simulated debris. The leg is acting as a foot. And in fact, the animal contacts other parts of its leg more frequently than the traditionally defined foot. The foot is distributed along the whole leg. You can do another experiment where you can take a cockroach with a foot, and you can remove its foot. I'm passing some cockroaches around. Take a look at their feet. Without a foot, here's what it does. It doesn't even slow down. It can run the same speed without even that segment. No problem for the cockroach -- they can grow them back, if you care. How do they do it? Look carefully: this is slowed down 100 times, and watch what it's doing with the rest of its leg. It's acting, again, as a distributed foot -- very effective.
Så, det næste spørgsmål vi havde; hvor general er en fordelt fod? Og den næstes dyrs adfærd jeg viser jer, lamslog os da vi så det for første gang. Journalister, dette er stadig hemmeligt, i har embargo -- se hvad det er! Det er en tobenet blæksprutte der er forklædt som en rullende kokosnød. Den var opdaget af Christina Huffard og filmet af Sea Studios, lige her fra Monterey.
Now, the question we had is, how general is a distributed foot? And the next behavior I'll show you of this animal just stunned us the first time that we saw it. Journalists, this is off the record; it's embargoed. Take a look at what that is! That's a bipedal octopus that's disguised as a rolling coconut. It was discovered by Christina Huffard and filmed by Sea Studios, right here from Monterey.
Vi har også beskrevet en anden art af tobenet blæksprutte. Denne er forklædt som flydende alger. Den går på to ben, og holder den anden arm op i vejret så den ikke kan blive set. (Bifald) Og se hvad den gør med sin fod for at komme over svært terræn. Den bruger den smukke fordelte fod, så det ligner hindringen slet ikke er der. Intet mindre end ekstraordinært.
We've also described another species of bipedal octopus. This one disguises itself as floating algae. It walks on two legs and it holds the other arms up in the air so that it can't be seen. (Applause) And look what it does with its foot to get over challenging terrain. It uses that beautiful distributed foot to make it as if those obstacles are not even there -- truly extraordinary.
I 1951 lavede Escher denne tegning. Han troede han lavede et væsen af fantasi. Men vi ved at kunsten imiterer livet, og det viser sig, tre millioner siden udviklede naturen det næste dyr. Det er et reje-agtigt dyr kaldet stomatopod, og sådan her bevæger den sig på Panamas strande: den ruller faktisk, og den kan endda rulle opad bakke. Den er den ultimative fordelte fod; hele dens krop agerer som en fod.
In 1951, Escher made this drawing. He thought he created an animal fantasy. But we know that art imitates life, and it turns out nature, three million years ago, evolved the next animal. It's a shrimp-like animal called the stomatopod, and here's how it moves on the beaches of Panama: it actually rolls, and it can even roll uphill. It's the ultimate distributed foot: its whole body in this case is acting like its foot.
Så det første vigtige vi vil tilføje til fodens byggeplan er en fordelt fods kontakt med overflader. Ikke bare en traditionel fod, men også benet, og selv kroppen. Kan dette inspirere designs af nye robotter? Denne biologisk inspirerede robot ved navn RHex, bygget af disse ekstraordinære ingeniører i løbet af de sidste par år. RHex's fod startede med at være simpel, den blev forbedret gennem tiden, og resulterede i denne halvcirkel. Hvorfor det? Denne video vil vise det. Hold øje med robotten, nu, bruger benets kontaktoverflade til at håndtere svært terræn. Hvad du vil kunne se, er dens halvcirkel ben fungere som en fordelt fod. Se den gå over det. Man kan se det godt på denne hindring. Ekstraordinært. Ingen sensors, alt control er indbygget i benene. Meget simpelt, men smukt.
So, if we want to then, to our blueprint, add the first important feature, we want to add distributed foot contact. Not just with the traditional foot, but also the leg, and even of the body. Can this help us inspire the design of novel robots? We biologically inspired this robot, named RHex, built by these extraordinary engineers over the last few years. RHex's foot started off to be quite simple, then it got tuned over time, and ultimately resulted in this half circle. Why is that? The video will show you. Watch where the robot, now, contacts its leg in order to deal with this very difficult terrain. What you'll see, in fact, is that it's using that half circle leg as a distributed foot. Watch it go over this. You can see it here well on this debris. Extraordinary. No sensing, all the control is built right into the tuned legs. Really simple, but beautiful.
Nu har du måske bemærket noget andet ved dyrene da de løb over svært terræn. Min assistent vil hjælpe mig nu. Da du rørte ved kakkelarkens ben -- kan du give ham en mikrofon? Da du rørte kakkelarkens bens, hvordan var det? Lagde du mærke til noget?
Now, you might have noticed something else about the animals when they were running over the rough terrain. And my assistant's going to help me here. When you touched the cockroach leg -- can you get the microphone for him? When you touched the cockroach leg, what did it feel like? Did you notice something?
Dreng: Tornet.
Boy: Spiny.
Robert Full: Det er tornet, ikke? Det er virkeligt tornet, ikke? Det gør næsten ondt. Måske er vores kurator modig nok til at røre kakkelarkens? (Latter)
Robert Full: It's spiny, right? It's really spiny, isn't it? It sort of hurts. Maybe we could give it to our curator and see if he'd be brave enough to touch the cockroach. (Laughter)
Chris Anderson: Rørte du ved den?
Chris Anderson: Did you touch it?
Robert Full: Hvis du ser nøje efter, kan du se den har pigge og indtil et par uger siden, vidste ingen hvad de gjorde. De antog de var til beskyttelse og sansning. Vi fandt ud af de er til noget andet -- her er en del af den pig. De er lavet sådan, så de nemt kollapser i én retning for at trække benet fri, men de er stive i den anden retning, for at holde fast i ulige overflader.
RF: So if you look carefully at this, what you see is that they have spines and until a few weeks ago, no one knew what they did. They assumed that they were for protection and for sensory structures. We found that they're for something else -- here's a segment of that spine. They're tuned such that they easily collapse in one direction to pull the leg out from debris, but they're stiff in the other direction so they capture disparities in the surface.
Krabber mister ikke fodfæstet, for de går normalt på sand -- indtil de kommer ind i vores laboratorie. Her har de et problem med denne slags net, fordi de ikke har pigge. Krabber mangler piggene, så de har et problem i svært terræn. Men det kan vi selvfølgelig klare, fordi vi kan lave kunstige pigge. Vi kan lave pigge der griber simulerede hindringer og kollapser den anden vej så de nemt hives fri. Dette gjorde vi ved at sætte kunstige pigge på krabben som du ser her, og så afprøvede vi det. Forstår vi virkelig princippet bag forbedringer? Svaret er, ja! Her er den sænket 20 gange, og krabben suser over de simulerede hindringer. (Latter og Bifald) Lidt bedre end naturen.
Now crabs don't miss footholds, because they normally move on sand -- until they come to our lab. And where they have a problem with this kind of mesh, because they don't have spines. The crabs are missing spines, so they have a problem in this kind of rough terrain. But of course, we can deal with that because we can produce artificial spines. We can make spines that catch on simulated debris and collapse on removal to easily pull them out. We did that by putting these artificial spines on crabs, as you see here, and then we tested them. Do we really understand that principle of tuning? The answer is, yes! This is slowed down 20-fold, and the crab just zooms across that simulated debris. (Laughter) (Applause) A little better than nature.
Så til vores byggeplan skal vi tilføje sådanne pigge. Vil dette hjælpe os med at lave mere effektive klatrene robotter? Her er RHex -- RHex har problemer på skinner -- glatte skinner som du kan se her. Hvorfor ikke tilføje en pig? Mine kolleger ved U Penn gjorde dette. Dan Koditschek satte nogle stål søm på -- meget simpel version -- på robotten -- og her er RHex, gående over de stål skinner. Uden problemer! Hvordan gør den det? Hvis vi sænker farten kan du piggene i aktion. Benet drejer rundt, og du kan se den tage fat lige der. Det kunne den ikke før, den ville bare glide og side fast og vælte. Og se det igen, lige der -- succes.
So to our blueprint, we need to add tuned spines. Now will this help us think about the design of more effective climbing robots? Well, here's RHex: RHex has trouble on rails -- on smooth rails, as you see here. So why not add a spine? My colleagues did this at U. Penn. Dan Koditschek put some steel nails -- very simple version -- on the robot, and here's RHex, now, going over those steel -- those rails. No problem! How does it do it? Let's slow it down and you can see the spines in action. Watch the leg come around, and you'll see it grab on right there. It couldn't do that before; it would just slip and get stuck and tip over. And watch again, right there -- successful.
Bare fordi vi har en fordelt fod og pigge betyder det ikke man kan klatre lodrette flader. Det er svært, rigtigt svært. Men se det her dyr gøre det! En af dem jeg sender rundt klatrer op ad en lodret overflade - en glat metal plade. Det er helt vildt så hurtigt den gør det -- men hvis man sænker farten, vil du se noget der er meget ekstraordinært. Det er en hemmelighed. Dyret klatrer ved at glide, og se -- den er faktisk forfærdeligt dårligt til at gribe overfladen. Det ser ud som om den svømmer op ad fladen. Vi kan faktisk modellere den adfærd bedre som en væske. Den fordelte fod, virker mere som padle.
Now just because we have a distributed foot and spines doesn't mean you can climb vertical surfaces. This is really, really difficult. But look at this animal do it! One of the ones I'm passing around is climbing up this vertical surface that's a smooth metal plate. It's extraordinary how fast it can do it -- but if you slow it down, you see something that's quite extraordinary. It's a secret. The animal effectively climbs by slipping and look -- and doing, actually, terribly, with respect to grabbing on the surface. It looks, in fact, like it's swimming up the surface. We can actually model that behavior better as a fluid, if you look at it. The distributed foot, actually, is working more like a paddle.
Det samme gælder hvis vi kigger på firbenet løbende på meget fint sand. Se dens fødder. De virker som en padle selvom den løber på en flade vi normalt tænker på som fast. Dette minder meget om hvad min tidligere bachelorstuderende opdagede da hun fandt ud af hvordan firben kan løbe på vand. Kan vi bruge det til at lave en bedre robot? Martin Buehler gjorde det -- han er nu hos Boston Dynamics -- han tog denne idé og lavede RHex til Aqua RHex. Her er RHex med padler, nu konverteret til en utroligt manøvredygtig svømmende robot.
The same is true when we looked at this lizard running on fluidized sand. Watch its feet. It's actually functioning as a paddle even though it's interacting with a surface that we normally think of as a solid. This is not different from what my former undergraduate discovered when she figured out how lizards can run on water itself. Can you use this to make a better robot? Martin Buehler did -- who's now at Boston Dynamics -- he took this idea and made RHex to be Aqua RHex. So here's RHex with paddles, now converted into an incredibly maneuverable swimming robot.
Til ru overflader tilføjer dyr kløer. Du kunne sikkert mærke dem hvis du tog fat i den. Rørte du ved den?
For rough surfaces, though, animals add claws. And you probably feel them if you grabbed it. Did you touch it?
CA: Ja.
CA: I did.
RF: Og de er gode til at gribe overfalder med disse kløer. Mark Cutkosky ved Stanford Universitet, en af mine samarbejdspartnere, en fantastisk ingeniør der udviklede teknikken kaldet Shape Deposition Manufacturing, hvor han kan indstøbe kløer i den kunstige fod. Her er en simpel version af en fod til en ny robot jeg vil vise jer om lidt. Så til vores byggeplan tilføjer vi kløer. Hvis man ser på dyrene, for at kunne manøvrere på alle overflader, bruger dyrene hybrid mekanismer der indbefatter kløer, pigge, hår, puder, lim og kapillarrørs klæbemiddel og en hel masse andre ting. Disse er alle fra forskellige insekter. Der er en myre kravlende på af en lodret overflade. Lad os se på den myre.
RF: And they do really well at grabbing onto surfaces with these claws. Mark Cutkosky at Stanford University, one of my collaborators, is an extraordinary engineer who developed this technique called Shape Deposition Manufacturing, where he can imbed claws right into an artificial foot. And here's the simple version of a foot for a new robot that I'll show you in a bit. So to our blueprint, let's attach claws. Now if we look at animals, though, to be really maneuverable in all surfaces, the animals use hybrid mechanisms that include claws, and spines, and hairs, and pads, and glue, and capillary adhesion and a whole bunch of other things. These are all from different insects. There's an ant crawling up a vertical surface. Let's look at that ant.
Det er en myrefod. Du kan se hårene, kløerne og den her ting. Her er foden i luften. Se hvad der sker når foden går på din sandwich. Ser du hvad der sker? Den pude kommer ud. Det er der limen er. Her er en myrefod nedefra, og når kløerne ikke graver sig ned, kommer puden automatisk ud, uden myren gør noget. Det presses bare ud. Det her var svært at filme -- jeg tror det er hvor myrefoden er på snor. Det er svært at gøre. Sådan ser det ud tæt på -- Her er myrefoden og her er limen.
This is the foot of an ant. You see the hairs and the claws and this thing here. This is when its foot's in the air. Watch what happens when the foot goes onto your sandwich. You see what happens? That pad comes out. And that's where the glue is. Here from underneath is an ant foot, and when the claws don't dig in, that pad automatically comes out without the ant doing anything. It just extrudes. And this was a hard shot to get -- I think this is the shot of the ant foot on the superstrings. So it's pretty tough to do. This is what it looks like close up -- here's the ant foot, and there's the glue.
Vi opdagede at denne lim måske er en spændende tofaset blanding. Det hjælper ihvertfald med at holde fast. Til byggeplanden tilføjer vi klistrede puder. Nu tror du måske dette er vores inspiration til glatte overflader. Vi har noget bedre. Gekkoen er et godt eksempel på nanoteknologi i naturen. Det er dens fødder. De ligner næsten alienfødder. Hemmeligheden de holder fast med, er behårede tæer. De kan løbe op af overflader med en meter per sekund, 30 skridt på de ene sekund -- du kan knap se det. Sænker vi farten, placerer de deres fødder på otte millisekunder, og fjerner dem på 16 millisekunder. Hvis du ser hvordan de fjerner dem, det er bizart. De skræller dem af overfladen som du fjerner et stykke tape. Meget mærkeligt. Hvordan sidder de fast?
And we discovered this glue may be an interesting two-phase mixture. It certainly helps it to hold on. So to our blueprint, we stick on some sticky pads. Now you might think for smooth surfaces we get inspiration here. Now we have something better here. The gecko's a really great example of nanotechnology in nature. These are its feet. They're -- almost look alien. And the secret, which they stick on with, involves their hairy toes. They can run up a surface at a meter per second, take 30 steps in that one second -- you can hardly see them. If we slow it down, they attach their feet at eight milliseconds, and detach them in 16 milliseconds. And when you watch how they detach it, it is bizarre. They peel away from the surface like you'd peel away a piece of tape. Very strange. How do they stick?
Hvis man ser på deres fødder, har de blad-lignende strukturer kaldet linalae med millioner af hår. Hvert hår har den værst tænkelige tilfælde af splittede ender. Den har 100 til 1000 splittede ender, og det er sandheden, fordi de tillader intim kontakt. Gekkoen har en millard af disse 200-nanometer brede splittede ender. De sidder ikke fast med lim, og de virker ikke som velcro og det virker ikke som en sugekop. Vi opdagede de virker med intermolekylære kræfter. Så til byggeplanen splitter vi nogle hår. Det har inspireret designet af det første selvrensende tøre klæbemiddel -- nu med patent, det er vi glade for. Her er den simpleste version fra naturen, og her er min samarbejdspartner Ron Fearings forsøg på en kunstig version af det tøre klæbemiddel lavet af polyurethan. Her er det første forsøg med vægt på.
If you look at their feet, they have leaf-like structures called linalae with millions of hairs. And each hair has the worst case of split ends possible. It has a hundred to a thousand split ends, and that's the secret, because it allows intimate contact. The gecko has a billion of these 200-nanometer-sized split ends. And they don't stick by glue, or they don't work like Velcro, or they don't work with suction. We discovered they work by intermolecular forces alone. So to our blueprint, we split some hairs. This has inspired the design of the first self-cleaning dry adhesive -- the patent issued, we're happy to say. And here's the simplest version in nature, and here's my collaborator Ron Fearing's attempt at an artificial version of this dry adhesive made from polyurethane. And here's the first attempt to have it work on some load.
Dette har en kæmpe stor interesse i mange områder. Du kan sikkert finde på tusinder af anvendelser. Mange mennesker har netop det, og vi er spændte på at lave det som produkt. Vi har forestillet os produkter som denne her: Vi forestillede os et bio-inspireret plaster, hvor vi fjernede limen. Vi tog nogle hår fra en gekko, satte hårene på plastret og lavede dette plaster.
There's enormous interest in this in a variety of different fields. You could think of a thousand possible uses, I'm sure. Lots of people have, and we're excited about realizing this as a product. We have imagined products; for example, this one: we imagined a bio-inspired Band-Aid, where we took the glue off the Band-Aid. We took some hairs from a molting gecko; put three rolls of them on here, and then made this Band-Aid.
Det er en frivillig bachelor -- vi har 30.000 bachelorstuderende vi kan vælge blandt -- det er faktisk bare en rød tusch. Men det laver et fantastisk plaster. Det er åndbart, kan nemt tages af, der er ingen irritation og det virker under vand. Jeg synes det er et ekstraordinært eksempel på forskning drevet af nysgerrighed -- vi undrede os bare om hvordan de klatrede -- kan føre til ting vi ikke kunne forestille os. Det er bare et eksempel på hvorfor vi skal støtte nysgerrigheds-drevet forskning. Her bliver plastret taget af.
This is an undergraduate volunteer -- we have 30,000 undergraduates so we can choose among them -- that's actually just a red pen mark. But it makes an incredible Band-Aid. It's aerated, it can be peeled off easily, it doesn't cause any irritation, it works underwater. I think this is an extraordinary example of how curiosity-based research -- we just wondered how they climbed up something -- can lead to things that you could never imagine. It's just an example of why we need to support curiosity-based research. Here you are, pulling off the Band-Aid.
Vi har omdefineret hvad en fod er. Nu er spørgsmålet; kan vi bruge de her hemmeligheder, til at inspirere et design af en fod, bedre end naturens? Her er det nye projekt: Vi prøver at skabe den første klatrende eftersøgnings- og redningsrobot -- ingen sugekopper eller magneter -- der kun kan bruge bestemte overflader. Jeg kalder den nye robot RiSE, for "Robot in Scansorial Enviroment" -- det er klatrende omgivelser -- og vi har et ekstraordinært hold af biologer og ingeniører der laver robotten. Her er RiSE. Det er seksbenet og har en hale. Her er den på et hegn og et træ. Her er RiSE's første skridt på en hældning. Kan du høre lyden? Du kan høre den gå op. Her kommer den mod dig, dens første skridt op ad en væg. Den bruger kun sine simple fødder, så det er meget nyt. Men vi tror vi har dynamikken af robotten rigtig.
So we've redefined, now, what a foot is. The question is, can we use these secrets, then, to inspire the design of a better foot, better than one that we see in nature? Here's the new project: we're trying to create the first climbing search-and-rescue robot -- no suction or magnets -- that can only move on limited kinds of surfaces. I call the new robot RiSE, for "Robot in Scansorial Environment" -- that's a climbing environment -- and we have an extraordinary team of biologists and engineers creating this robot. And here is RiSE. It's six-legged and has a tail. Here it is on a fence and a tree. And here are RiSE's first steps on an incline. You have the audio? You can hear it go up. And here it is coming up at you, in its first steps up a wall. Now it's only using its simplest feet here, so this is very new. But we think we got the dynamics right of the robot.
Mark Cutkosky har dog taget den videre. Det er ham der kan lave de her form-depositions fødder og tæer. Næste skridt er at lave kompatible tæer, og prøve at tilføje pigge og kløet og det tøre klæbemiddel. Idéen er at få styr på tæer og foden først, prøve at klatre med dem, og til sidst sætte dem på robotten. Det er præcist det han har gjort. Han har bygget and klatrende "fod-bot" inspireret af naturen.
Mark Cutkosky, though, is taking it a step further. He's the one able to build this shape-deposition manufactured feet and toes. The next step is to make compliant toes, and try to add spines and claws and set it for dry adhesives. So the idea is to first get the toes and a foot right, attempt to make that climb, and ultimately put it on the robot. And that's exactly what he's done. He's built, in fact, a climbing foot-bot inspired by nature.
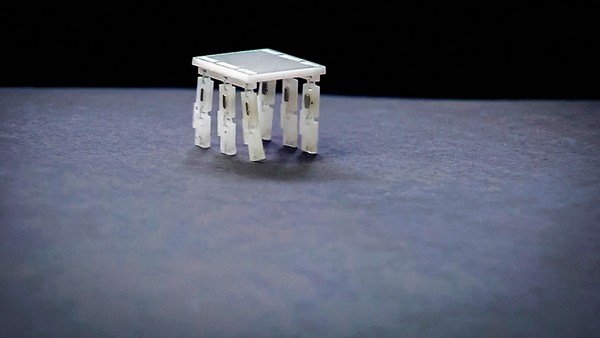
Her er Cutkosky og hans fantastiske studerendes design. De her er tunede tæer -- der er seks af dem, og de bruger den byggeplan jeg snakkede om. Der er altså ingen sugekopper eller lim, og den vil til sidst når den sidder på en robot -- den er lige så biologisk inspireret som dyret -- forhåbentligt klatre alle slags overflader. Her ser du den klatre op af en bygning på Stanford. Farten er sat op -- igen er det en klatrende fod. Det er ikke hele robotten, vi arbejder på den -- her kan du se hvordan den fastgører sig. Disse strukturer tillader pigge, friktionspuder og til sidst klæbende hår til at gribe svære overflader. Sådan fik de denne her ting -- hastigheden sat 20 gange op -- kan du forestille dig den forsøge at redde nogen oppe den øvre etage? OK? Du kan se det for dig, det er ikke umuligt. Det er en meget udfordrende opgave. Der kommer mere senere.
And here's Cutkosky's and his amazing students' design. So these are tuned toes -- there are six of them, and they use the principles that I just talked about collectively for the blueprint. So this is not using any suction, any glue, and it will ultimately, when it's attached to the robot -- it's as biologically inspired as the animal -- hopefully be able to climb any kind of a surface. Here you see it, next, going up the side of a building at Stanford. It's sped up -- again, it's a foot climbing. It's not the whole robot yet, we're working on it -- now you can see how it's attaching. These tuned structures allow the spines, friction pads and ultimately the adhesive hairs to grab onto very challenging, difficult surfaces. And so they were able to get this thing -- this is now sped up 20 times -- can you imagine it trying to go up and rescue somebody at that upper floor? OK? You can visualize this now; it's not impossible. It's a very challenging task. But more to come later.
Til slut: Vi har fået designhemmeligheder fra naturen ved at se på hvordan fødder er lavet. Vi har lært at fordele kontrollen over smarte dele. Sæt ikke alt i hjernen, men giv noget af kontrollen til fødderne, benene, selv kroppen. At naturen bruger hybride løsninger, ikke én løsning, til disse problemer, og de er integreret og fantastisk robuste. Og til sidst, tror vi stærkt at vi ikke skal efterligne naturen men i stedet blive inspireret af biologien, og bruge de her nye principper til at -- potentielt -- at lave noget bedre end naturen.
To finish: we've gotten design secrets from nature by looking at how feet are built. We've learned we should distribute control to smart parts. Don't put it all in the brain, but put some of the control in tuned feet, legs and even body. That nature uses hybrid solutions, not a single solution, to these problems, and they're integrated and beautifully robust. And third, we believe strongly that we do not want to mimic nature but instead be inspired by biology, and use these novel principles with the best engineering solutions that are out there to make -- potentially -- something better than nature.
Der er en klar besked: Uanset om du vil forske fundementalt i virkeligt spændende, bizarre, dejlige dyr, eller du vil bygge en Eftersøgnings- og redningsrobot der kan hjælpe dig i et jordskælv, eller redde en fra en ildebrand, eller du tænker på medicin, bliver vi nødt til at bevare naturens løsninger. Ellers vil disse hemmeligheder blive tabt for altid. Tak.
So there's a clear message: whether you care about a fundamental, basic research of really interesting, bizarre, wonderful animals, or you want to build a search-and-rescue robot that can help you in an earthquake, or to save someone in a fire, or you care about medicine, we must preserve nature's designs. Otherwise these secrets will be lost forever. Thank you.