Мне задаюць шмат пытанняў як робататэхнолагу. "Калі яны будуць падаваць нам сняданак?" Раней я думала, што будучыня робататэхнікі будзе больш падобная да нас. Думала ‒ яны будуць выглядаць як я, таму я стварыла вочы, што нагадваюць мае. Я стварыла пальцы, дастаткова спрытныя, каб падаваць мне бейсбольныя мячы.
As a roboticist, I get asked a lot of questions. "When we will they start serving me breakfast?" So I thought the future of robotics would be looking more like us. I thought they would look like me, so I built eyes that would simulate my eyes. I built fingers that are dextrous enough to serve me ... baseballs.
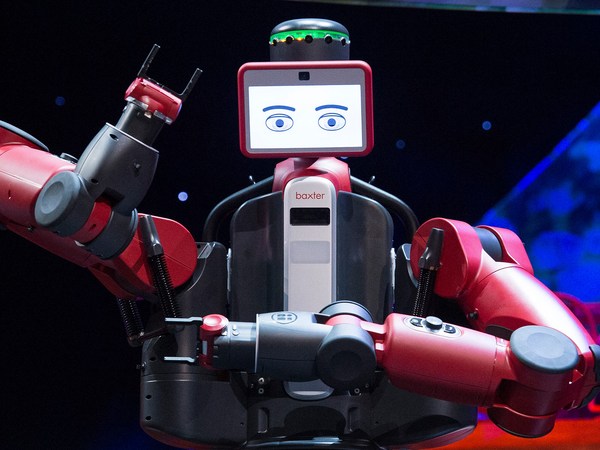
Класічныя робаты кшталту гэтага пабудаваны і становяцца функцыянальнымі згодна з пэўнай колькасцю суставаў і сілавых прывадаў. І гэта азначае, што іх функцыянальнасць і форма ўжо прадвызначаны ў момант іх стварэння. І нават калі гэтая рука мае вельмі добры кідок ‒ яна патрапіла ў штатыў напрыканцы ‒ яна не падыходзіць для гатавання вашага сняданку. Яна не вельмі падыходзіць для гатавання амлета.
Classical robots like this are built and become functional based on the fixed number of joints and actuators. And this means their functionality and shape are already fixed at the moment of their conception. So even though this arm has a really nice throw -- it even hit the tripod at the end-- it's not meant for cooking you breakfast per se. It's not really suited for scrambled eggs.
Так да мяне прыйшло новае бачанне будучыні робататэхнікі: трансформеры. Яны едуць, яны бягуць, яны лётаюць. Усё ў залежнасці ад вечна зменлівага асяроддзя і пастаўленнага задання. Каб ажыццявіць гэтую ідэю, трэба пераасэнсаваць працэс стварэння робатаў. Уявіце рабатызаваны модуль у форме шматкутніка і выкарыстоўванне гэтай простай формы для рэканструкцыі шматлікіх розных форм, каб стварыць новы тып робата для розных мэт. У КГ, камп'ютарнай графіцы, гэта не навіна ‒ такое робіцца ўжо даўно, так зроблена большасць фільмаў. Але калі вы спрабуеце стварыць робата, які фізічна рухаецца, гэта ўжо зусім іншае пытанне. Гэта зусім іншая парадыгма.
So this was when I was hit by a new vision of future robotics: the transformers. They drive, they run, they fly, all depending on the ever-changing, new environment and task at hand. To make this a reality, you really have to rethink how robots are designed. So, imagine a robotic module in a polygon shape and using that simple polygon shape to reconstruct multiple different forms to create a new form of robot for different tasks. In CG, computer graphics, it's not any news -- it's been done for a while, and that's how most of the movies are made. But if you're trying to make a robot that's physically moving, it's a completely new story. It's a completely new paradigm.
Але вы ўсе ўжо рабілі гэта. Хто не рабіў папяровага самалёціка, чоўна або жураўля? Арыгамі ‒ гэта ўніверсальная платформа для дызайнераў. З аднаго аркуша паперы вы можаце зрабіць шматлікія формы, і калі вам адна не падабаецца, вы можаце разгарнуць і пачаць нанова. Згарнуўшы аркуш, можна з 2D паверхні стварыць любую 3D форму, і гэта даказана матэматычна. Уявіце, што ў вас быў такі аркуш са штучным інтэлектам, што можа сам складвацца ў любую форму, у любы час. Над гэтым я і працую. Я называю гэта робататэхнічным арыгамі, або "робагамі".
But you've all done this. Who hasn't made a paper airplane, paper boat, paper crane? Origami is a versatile platform for designers. From a single sheet of paper, you can make multiple shapes, and if you don't like it, you unfold and fold back again. Any 3D form can be made from 2D surfaces by folding, and this is proven mathematically. And imagine if you were to have an intelligent sheet that can self-fold into any form it wants, anytime. And that's what I've been working on. I call this robotic origami, "robogami."
Гэта першая трансфармацыя робагамі, якая была створана мною гадоў 10 таму. Плоскі аркуш робата ператвараецца ў піраміду і зноў у плоскі аркуш, а потым у касмічны шатл. Даволі міла.
This is our first robogami transformation that was made by me about 10 years ago. From a flat-sheeted robot, it turns into a pyramid and back into a flat sheet and into a space shuttle. Quite cute.
Праз 10 год, дзякуючы маёй камандзе ніндзя-арыгамі-робата-даследчыкаў ‒ іх зараз прыкладна 22 ‒ мы атрымалі новае пакаленне робагамі, і яны крыху больш эфектыўныя і здольныя на большае. У новага пакалення робагамі ёсць мэта. Напрыклад, гэты робагамі самастойна арыентуецца на розных рэльефах. Калі мясцовасць сухая і плоская, ён паўзе. А калі ён натыкаецца на нечаканы шурпаты рэльеф, то пачынае каціцца. Усё гэта выконвае той самы робат, але ў залежнасці ад мясцовасці, з якой сутыкаецца, ён актывуе розную паслядоўнасць актуатараў. І калі ён натыкаецца на перашкоду, то скача праз яе. Ён робіць гэта праз накапленне энергіі ў кожнай з ног і праз яе выпуск ён катапультуецца, як рагатка. Ён выконвае нават гімнастычныя трукі. Крута.
Ten years later, with my group of ninja origami robotic researchers -- about 22 of them right now -- we have a new generation of robogamis, and they're a little more effective and they do more than that. So the new generation of robogamis actually serve a purpose. For example, this one actually navigates through different terrains autonomously. So when it's a dry and flat land, it crawls. And if it meets sudden rough terrain, it starts rolling. It does this -- it's the same robot -- but depending on which terrain it meets, it activates a different sequence of actuators that's on board. And once it meets an obstacle, it jumps over it. It does this by storing energy in each of its legs and releasing it and catapulting like a slingshot. And it even does gymnastics. Yay.
(Смех)
(Laughter)
Я паказала вам, што можа зрабіць адзін робагамі. Уявіце, што яны могуць рабіць у групе. Яны могуць аб'ядноўваць намаганні, каб вырашыць больш складаныя праблемы. Кожны модуль, актыўны ці пасіўны, мы можам сабраць разам у розныя формы. Кантралюючы суставы, што могуць згінацца, мы здольныя ствараць і вырашаць розныя задачы. Форма стварае новую прастору для пастаноўкі задач. І гэтым разам іх узаемадзеянне з'яўляецца галоўным. Ім трэба самастойна знаходзіць адзін аднаго на прасторы, прымацоўвацца і аддзяляцца, гледзячы на мясцовасць і задачу. І зараз мы можам гэта рабіць.
So I just showed you what a single robogami can do. Imagine what they can do as a group. They can join forces to tackle more complex tasks. Each module, either active or passive, we can assemble them to create different shapes. Not only that, by controlling the folding joints, we're able to create and attack different tasks. The form is making new task space. And this time, what's most important is the assembly. They need to autonomously find each other in a different space, attach and detach, depending on the environment and task. And we can do this now.
Дык што далей? Толькі нашае ўяўленне.
So what's next? Our imagination.
Гэта сімуляцыя таго, чаго можна дабіцца з дапамогай гэтага тыпу модуля. Мы вырашылі спраектаваць робата, што перамяшчаецца на 4 нагах, пераўтвараецца ў сабачку, і робіць маленькія крокі. Той самы модуль мы можам ператварыць у нешта іншае: у маніпулятар, які выконвае тыповыя заданні класічнай робататэхнікі. З дапамогай маніпулятара можна падняць нейкі прадмет. Безумоўна, можна дадаць больш модуляў, каб зрабіць ногі маніпулятара даўжэй, каб браць або падымаць прадметы большага ці меншага памеру, ці нават стварыць трэцюю руку. У робагамі не існуе адной фіксаванай формы ці задачы. Яны могуць трансфармавацца ў што заўгодна, у любым месцы, у любы час.
This is a simulation of what you can achieve with this type of module. We decided that we were going to have a four-legged crawler turn into a little dog and make small gaits. With the same module, we can actually make it do something else: a manipulator, a typical, classical robotic task. So with a manipulator, it can pick up an object. Of course, you can add more modules to make the manipulator legs longer to attack or pick up objects that are bigger or smaller, or even have a third arm. For robogamis, there's no one fixed shape nor task. They can transform into anything, anywhere, anytime.
Але як іх стварыць? Самая вялікая тэхналагічная праблема ‒ захаваць рабагамі ўльтратонкімі, пластычнымі, але функцыянальнымі. Робагамі складаюцца са шматлікіх пластоў схем, рухавікоў мікракантролераў ды сэнсараў, усё ў адзіным корпусе. І калі вы кантралюеце кожны згінальны сустаў, то можаце дасягнуць такі плаўны рух па вашай камандзе. Замест адзінага робата, што быў створаны для выканання адной задачы, робагамі аптымізаваныя для выканання розных задач. І гэта досыць важна для складаных і ўнікальных умоў асяроддзя як на Зямлі, так і ў космасе.
So how do you make them? The biggest technical challenge of robogami is keeping them super thin, flexible, but still remaining functional. They're composed of multiple layers of circuits, motors, microcontrollers and sensors, all in the single body, and when you control individual folding joints, you'll be able to achieve soft motions like that upon your command. Instead of being a single robot that is specifically made for a single task, robogamis are optimized to do multi-tasks. And this is quite important for the difficult and unique environments on the Earth as well as in space.
Космас ‒ ідэальнае ассяроддзе для робагамі. Нельга дазволіць сабе мець адзінага робата для адзінай задачы. Хто ведае, колькі задач будзе неабходна выканаць у космасе? Патрэбна адна рабатызаваная платформа, якая трансфармуецца для безлічы задач. Неабходна мець адзіны камплект тонкіх модуляў робагамі, здатных да трансфармацыі для выканання розных задач. І не сумнявайцеся, бо Еўрапейскае касмічнае агенцтва ды Швейцарскі касмічны цэнтр спансуюць рэалізацыю гэтай канцэпцыі.
Space is a perfect environment for robogamis. You cannot afford to have one robot for one task. Who knows how many tasks you will encounter in space? What you want is a single robotic platform that can transform to do multi-tasks. What we want is a deck of thin robogami modules that can transform to do multiples of performing tasks. And don't take my word for it, because the European Space Agency and Swiss Space Center are sponsoring this exact concept.
Перад вамі некалькі вобразаў робагамі са змененай структурай, што даследуюць паверхню іншай планеты, а таксама паглыбляюцца ў зямлю. Гэта не проста даследаванне. Касманаўтам патрэбна дадатковая дапамога, бо яны не могуць узяць з сабою стажораў.
So here you see a couple of images of reconfiguration of robogamis, exploring the foreign land aboveground, on the surface, as well as digging into the surface. It's not just exploration. For astronauts, they need additional help, because you cannot afford to bring interns up there, either.
(Смех)
(Laughter)
Робагамі мусяць брацца за кожную нудную задачу. Яны могуць быць простымі, але надзвычайна інтэрактыўнымі. Таму патрэбныя робаты, што палягчаюць правядзенне эксперыментаў, што забяспечваюць камунікацыю і проста высаджваюцца на розныя паверхні ў якасці трэцяй рукі з інструментамі. Але як касманаўты могуць кантраляваць робагамі па-за касмічнай станцыяй? У дадзеным выпадку я пакажу вам робагамі, які трымае касмічнае смецце. Можна кантраляваць робагамі зрокам, але лепш было б скарыстацца сэнсам дотыку, які беспасрэдна перадаецца ў рукі касманаўтаў. І патрэбна мець толькі тактыльны прыбор, тактыльны інтэрфейс, які стварае адчуванне дотыку. І выкарыстоўваючы робагамі, мы можам гэтага дабіцца.
They have to do every tedious task. They may be simple, but super interactive. So you need robots to facilitate their experiments, assisting them with the communications and just docking onto surfaces to be their third arm holding different tools. But how will they be able to control robogamis, for example, outside the space station? In this case, I show a robogami that is holding space debris. You can work with your vision so that you can control them, but what would be better is having the sensation of touch directly transported onto the hands of the astronauts. And what you need is a haptic device, a haptic interface that recreates the sensation of touch. And using robogamis, we can do this.
Гэта найменшы ў свеце тактыльны інтэрфейс, які можа перадаць сэнс дотыку на кончыкі пальцаў. Гэта зроблена праз прывядзенне ў рух робагамі, дзякуючы мікраскапічным рухам і рухам, што можна пабачыць няўзброеным вокам. І праз гэта вы зможаце не толькі адчуць памер прадмета, акругласць ды форму, але і жорсткасць ды тэкстуру. Алекс трымае свой вялікі палец на гэтым інтэрфейсе, і калі б ён выкарыстаў гэта з ВР акулярамі і кантролерамі, віртуальная рэальнасць перастала б быць віртуальнаю. Гэта рэальнасць, да якой можна датыкнуцца. Сіні шар, чырвоны шар і чорны шар больш не адрозніваюцца колерам. Зараз гэта гумавы сіні шар, губкавы чырвоны шар і більярдны чорны шар. Цяпер гэта магчыма. Я прадэманструю.
This is the world's smallest haptic interface that can recreate a sensation of touch just underneath your fingertip. We do this by moving the robogami by microscopic and macroscopic movements at the stage. And by having this, not only will you be able to feel how big the object is, the roundness and the lines, but also the stiffness and the texture. Alex has this interface just underneath his thumb, and if he were to use this with VR goggles and hand controllers, now the virtual reality is no longer virtual. It becomes a tangible reality. The blue ball, red ball and black ball that he's looking at is no longer differentiated by colors. Now it is a rubber blue ball, sponge red ball and billiard black ball. This is now possible. Let me show you.
Гэта адбываецца насамрэч упершыню ўжывую перад вялікай аудыторыяй, спадзяюся, што ўсё спрацуе. Вы бачыце анатамічны атлас і тактыльны інтэрфейс робагамі. Падобна да ўсіх іншых робатаў са зменнай структурай, ён шматзадачны. Ён не толькі камп'ютарная мыш, але і тактыльны інтэрфейс.
This is really the first time this is shown live in front of a public grand audience, so hopefully this works. So what you see here is an atlas of anatomy and the robogami haptic interface. So, like all the other reconfigurable robots, it multitasks. Not only is it going to serve as a mouse, but also a haptic interface.
Зараз курсор знаходзіцца на пустым белым фоне. Таму мы нічога і не адчуваем, таму што інтэрфейс вельмі гнуткі. А цяпер я выкарыстаю яго як мыш, каб прыблізіцца да скуры, мышцаў рукі, а зараз датыкнемся да біцэпсаў ці пляча. І зараз вы бачыце, наколькі больш жорсткім становіцца робагамі. Працягнем даследаванне. Наблізімся да рэбраў. Як толькі курсор наязджае на грудную клетку і міжрэбраныя мышцы, што адрозніваюцца па жорсткасці, я магу адчуць гэтую розніцу. Паверце мне на слова. Бачыце, робагамі зараз нашмат больш жорсткі, і я адчуваю гэта на дотык.
So for example, we have a white background where there is no object. That means there is nothing to feel, so we can have a very, very flexible interface. Now, I use this as a mouse to approach skin, a muscular arm, so now let's feel his biceps, or shoulders. So now you see how much stiffer it becomes. Let's explore even more. Let's approach the ribcage. And as soon as I move on top of the ribcage and between the intercostal muscles, which is softer and harder, I can feel the difference of the stiffness. Take my word for it. So now you see, it's much stiffer in terms of the force it's giving back to my fingertip.
Я паказала вам нерухомыя паверхні. А што калі я паспрабую нешта рухомае, напрыклад, сэрца? Што б я адчула? (Палец вібруе)
So I showed you the surfaces that aren't moving. How about if I were to approach something that moves, for example, like a beating heart? What would I feel?
(Апладысменты)
(Applause)
Гэта можа быць ваша сэрца. Робагамі можа быць у вашай кішэні, пакуль вы робіце пакупкі анлайн. Вы зможаце адчуць матэрыял швэдара, які вы вырашылі набыць, адчуць наколькі ён мягкі, ці сапраўдны гэта кашэмір, ці дакрануцца да пончыка, пачуць, наколькі ён жорсткі ці хрумсткі. Цяпер гэта магчыма.
This can be your beating heart. This can actually be inside your pocket while you're shopping online. Now you'll be able to feel the difference of the sweater that you're buying, how soft it is, if it's actually cashmere or not, or the bagel that you're trying to buy, how hard it is or how crispy it is. This is now possible.
Робататэхніка рухаецца наперад, каб стаць больш адаптыўнай і персанальнай, каб прыстасавацца да нашых паўсядзённых патрэб. Гэты ўнікальны тып зменлівых робатаў насамрэч з'яўляецца платформай для нябачнага, інтуітыўнага інтэрфейсу, каб задаволіць нашы патрэбы. Гэтыя робаты больш не будуць выглядаць як героі з фільмаў. Яны будуць выглядаць так, як мы толькі захочам.
The robotics technology is advancing to be more personalized and adaptive, to adapt to our everyday needs. This unique specie of reconfigurable robotics is actually the platform to provide this invisible, intuitive interface to meet our exact needs. These robots will no longer look like the characters from the movies. Instead, they will be whatever you want them to be.
Дзякуй.
Thank you.
(Апладысменты)
(Applause)