Mit job er at designe, bygge og studere robotter, som kommunikerer med mennesker. Men denne historie starter slet ikke med robotteknologi, den starter med animation. Da jeg første gang så Pixars "Luxo Jr.," blev jeg overvældet over hvor meget følelse de kunne putte ind i noget så hverdagsagtigt som en skrivebordslampe. Jeg mener, se på dem - i slutningen af filmen føler man rent faktisk noget for to stykker møbel. (Folk griner) Og jeg sagde, jeg er nødt til at lære hvordan man gør det her. Derfor foretog en virkeligt dårlig beslutning for min karriere. Og det var sådan min mor var, da jeg gjorde det.
My job is to design, build and study robots that communicate with people. But this story doesn't start with robotics at all, it starts with animation. When I first saw Pixar's "Luxo Jr.," I was amazed by how much emotion they could put into something as trivial as a desk lamp. I mean, look at them -- at the end of this movie, you actually feel something for two pieces of furniture. (Laughter) And I said, I have to learn how to do this. So I made a really bad career decision. (Laughter)
(Folk griner) Jeg forlod et rigtig hyggeligt teknisk job i Israel hos et godt software firma og flyttede til New York for at studere animation. Og der boede jeg med nogle samboer i et lejlighedskompleks i Harlem, der var ved at styrte sammen. Jeg bruger ikke den sætning i overført betydning, en dag faldt loftet rent faktisk ned i vores stue. Hver gang de lavede nyhedsindslag om bygningsovertrædelser i New York, så lavede de rapporten foran vores bygning. Som en slags baggrund, der skulle vise hvor slemt det stod til.
And that's what my mom was like when I did it. (Laughter) I left a very cozy tech job in Israel at a nice software company and I moved to New York to study animation. And there I lived in a collapsing apartment building in Harlem with roommates. I'm not using this phrase metaphorically -- the ceiling actually collapsed one day in our living room. Whenever they did news stories about building violations in New York, they would put the report in front of our building, as kind of, like, a backdrop to show how bad things are.
Nå, men om dagen gik jeg i skole og om aftenen sad jeg og tegnede blyantsanimation, billede efter billede. Og jeg lærte to overraskende lektier - en af dem var, at når man ønsker at vække følelse, så betyder det ikke så meget hvordan en genstand ser ud, det hele ligger i bevægelsen - i timingen af genstandens bevægelser. Og den anden lektie var noget, som en af vores lærere fortalte os. Han skabte faktisk væslen i Ice Age. Og han sagde: "Som animator, er du ikke instruktør, du er skuespiller." Så hvis du skal finde den rigtige bevægelse til en figur, så lad være med at tænke over det, bare brug din krop til at finde den - stil dig foran et spejl, spil skuespil foran et kamera - hvad end du må gøre. Og put dette ind i din figur.
Anyway, during the day, I went to school and at night I would sit and draw frame by frame of pencil animation. And I learned two surprising lessons. One of them was that when you want to arouse emotions, it doesn't matter so much how something looks; it's all in the motion, in the timing of how the thing moves. And the second was something one of our teachers told us. He actually did the weasel in "Ice Age." And he said, "As an animator, you're not a director -- you're an actor." So, if you want to find the right motion for a character, don't think about it -- go use your body to find it. Stand in front of a mirror, act it out in front of a camera -- whatever you need -- and then put it back in your character.
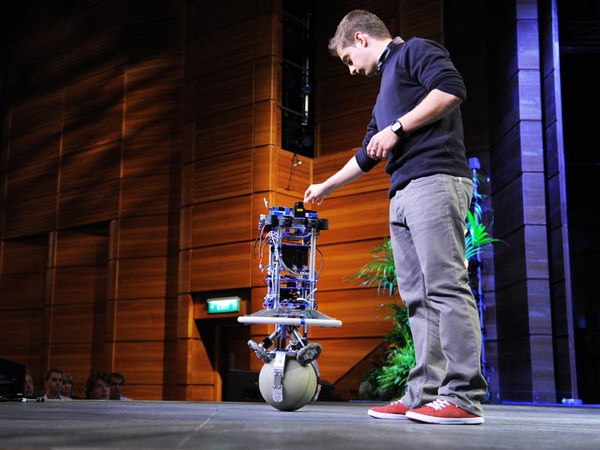
Et år senere befandt jeg mig på Massachusetts Institute of Technology, MIT, i en gruppe om robotteknisk liv, det var en af de første grupper der studerede forholdet mellem mennesker og robotter. Og jeg havde stadig drømmen om at lave en ægte, fysisk Luxo Jr.-lampe. Men jeg opdagede at robotter overhovedet ikke bevægede sig på den vedkommende måde, som jeg var vant til i mine animationsstudier. Istedet var de alle - hvordan skal jeg sige det, de var alle ret robot-agtige. (Folk griner) Og jeg tænkte, hvad hvis jeg tager dét, som jeg lærte på animationsskolen, og bruger det i designet af min skrivebordslampe-robot. Så jeg begyndte at designe, billede for billede, for at forsøge at gøre denne robot så elegant og engagerende som muligt. Og her ser I robotten interagere med mig på et skrivebord. Og jeg er faktisk igang med at omdesigne robotten, så uden den ved det, så graver den faktisk sin egen grav ved at hjælpe mig. (Folk griner) Jeg ville gerne have en mindre mekanisk struktur, der bare giver lys, og mere end hjælpsom, stille lærling, som altid er der, når du skal bruge den, og ikke rigtig forstyrrer. Og når jeg for eksempel leder efter et batteri, som jeg ikke kan finde, så skal den vise mig, hvor batteriet er. I kan se min forvirring her. Jeg er ikke skuespiller. Og jeg synes I skal lægge mærke til, hvordan den samme mekaniske struktur i ét tilfælde, udelukkende igennem bevægelser, kan virke blid og omsorgsfuld - og i et andet tilfælde virke voldsom og konfrontatorisk. Og det er den samme struktur, det er bare bevægelsen der er anderledes. Skuespiller: "Skal jeg sige dig noget? Hva', skal jeg sige dig noget? Han var allerede død! Han lå bare der med tomme øjne!" (Folk griner) Men at bevæge sig elegant er bare én byggesten i hele den struktur, som vi kalder interaktion mellem mennesker og robotter. På det tidspunkt var jeg igang med min Ph.D., jeg arbejdede med samarbejde mellem mennesker og robotter; hold af mennesker og robotter der arbejdede sammen. Jeg studerede konstruktionen, psykologien, filosofien i samarbejdet. Og på samme tid befandt jeg mig i min egen samarbejdssituation med en god ven, som faktisk er her. Og i den situation kan vi nemt forestille os robotter i den nære fremtid, som er der sammen med os. Det var efter en Pesach seder [jødisk påskemiddag]. Vi var ved at folde en masse stole sammen, og jeg var overrasket over, hvor hurtigt vi fandt vores egen rytme. Alle gjorde deres del. Vi behøvede ikke opdele arbejdet mellem os. Vi behøvede ikke kommunikere verbalt om det. Det skete bare. Og jeg tænkte, mennesker og robotter er slet ikke sådan her. Når mennesker og robotter interagerer, så er det mere som et spil skak. Mennesket gør noget, robotten analyserer, hvad mennesket gjorde, og så bestemmer robotten sig for sit næste træk, planlægger det, og gør det. Og så venter mennesket indtil det er dennes tur igen. Så det minder mere om et spil skak, og det giver mening, fordi skak er optimalt for matematikere og dataloger. Det handler om informationsanalyse, beslutningsprocesser og planlægning.
A year later I found myself at MIT in the Robotic Life Group. It was one of the first groups researching the relationships between humans and robots. And I still had this dream to make an actual, physical Luxo Jr. lamp. But I found that robots didn't move at all in this engaging way that I was used to from my animation studies. Instead, they were all -- how should I put it -- they were all kind of robotic. (Laughter) And I thought, what if I took whatever I learned in animation school, and used that to design my robotic desk lamp. So I went and designed frame by frame to try to make this robot as graceful and engaging as possible. And here when you see the robot interacting with me on a desktop -- and I'm actually redesigning the robot, so, unbeknownst to itself, it's kind of digging its own grave by helping me. (Laughter) I wanted it to be less of a mechanical structure giving me light, and more of a helpful, kind of quiet apprentice that's always there when you need it and doesn't really interfere. And when, for example, I'm looking for a battery that I can't find, in a subtle way, it'll show me where the battery is. So you can see my confusion here. I'm not an actor. And I want you to notice how the same mechanical structure can, at one point, just by the way it moves, seem gentle and caring and in the other case, seem violent and confrontational. And it's the same structure, just the motion is different. Actor: "You want to know something? Well, you want to know something? He was already dead! Just laying there, eyes glazed over!" (Laughter) But, moving in a graceful way is just one building block of this whole structure called human-robot interaction. I was, at the time, doing my PhD, I was working on human-robot teamwork, teams of humans and robots working together. I was studying the engineering, the psychology, the philosophy of teamwork, and at the same time, I found myself in my own kind of teamwork situation, with a good friend of mine, who's actually here. And in that situation, we can easily imagine robots in the near future being there with us. It was after a Passover Seder. We were folding up a lot of folding chairs, and I was amazed at how quickly we found our own rhythm. Everybody did their own part, we didn't have to divide our tasks. We didn't have to communicate verbally about this -- it all just happened. And I thought, humans and robots don't look at all like this. When humans and robots interact, it's much more like a chess game: the human does a thing, the robot analyzes whatever the human did, the robot decides what to do next, plans it and does it. Then the human waits, until it's their turn again. So it's much more like a chess game, and that makes sense, because chess is great for mathematicians and computer scientists. It's all about information, analysis, decision-making and planning.
Men jeg ville ikke have min robot til at være en skakspiller, nærmere en handlingsmand, som bare klikker og samarbejder. Så jeg foretog mit andet håbløse karrierevalg: Jeg valgte at studere skuespil i et semester. Jeg tog fri fra min Ph.D. og gik til dramatimer. Jeg deltog faktisk i et skuespil, jeg håber ikke der stadig findes nogen videoer af det. Og jeg fandt så mange bøger jeg kunne om skuespilkunst,
But I wanted my robot to be less of a chess player, and more like a doer that just clicks and works together. So I made my second horrible career choice: I decided to study acting for a semester. I took off from the PhD, I went to acting classes. I actually participated in a play -- I hope there’s no video of that around still. (Laughter)
inklusiv en fra det 19. århundrede som jeg lånte på biblioteket. Og jeg blev ret forbløffet over at mit navn var nummer to på listen -- det sidste navn var i 1889. (Folk griner) Og denne bog havde nærmest ventet i 100 år på at blive genopdaget til robotteknologien. Og denne bog viser skuespillere hvordan de skal bevæge hver muskel i kroppen for at matche hver eneste følelse de vil udtrykke.
And I got every book I could find about acting, including one from the 19th century that I got from the library. And I was really amazed, because my name was the second name on the list -- the previous name was in 1889. (Laughter) And this book was kind of waiting for 100 years to be rediscovered for robotics. And this book shows actors how to move every muscle in the body
Men den sande åbenbaring var da jeg lærte om Method Acting. Det blev meget populært i det 20. århundrede. Og Method Acting foreskriver, at du ikke behøver planlægge alle muskler i din krop. Istedet skal du bruge din krop til at finde den rigtige bevægelse. Du skal bruge din sansehukommelse til at rekonstruere følelserne og nærmest tænke med din krop, for at finde det rigtige udtryk. Improviser, spil sammen med din medskuespiller på scenen. Og dette kom samtidig med at jeg læste om et trend i kognitiv psykologi, kaldet kropsliggjort kognition. Som også taler om de samme ideer -- Vi bruger vores kroppe til at tænke, vi bruger ikke bare hjernen til at tænke, og kroppen til bevægelse. Men vores kroppe viser tilbage til hjernen for at generere den måde vi opfører os på. Og det var som et lyn fra en klar himmel. Jeg tog tilbage til mit kontor. Jeg skrev en artikel -- som jeg aldrig rigtig udgav, kaldet "Dramalektioner for Kunstig Intelligens." Og jeg brugte endda endnu en måned på at lave hvad der dengang var det første teaterstykke med et menneske og en robot der spillede sammen. Det var dét i så før med skuespillerne. Og jeg tænkte: Hvordan kan vi lave en model indenfor kunstig intelligens -- en computer-, eller datamodel -- som kan illustrere nogle af disse improvisationsideer, såsom at tage risici og chancer, endda lave fejl. Måske ville dette føre til bedre robot-samarbejdspartnere. Så jeg arbejdede ret lang tid på disse modeller og implementerede dem i et antal robotter. Her kan I se et meget tidligt eksempel kropsliggjorte kunstige intelligens, til at matche mine bevægelser så tæt som muligt, nærmest som et spil. Lad os se på det. Du kan se, at når jeg stresser den, bliver den narret. Og det er lidt som det man ser skuespillere gøre, når de forsøger at være spejlbilleder på hinanden for at finde den rigtige synkroni imellem dem. Og så foretog jeg et andet eksperiment, og jeg fik folk på gaden til at bruge robot-skrivebordslampen, for at forsøge sig med ideen om kropsliggjort kunstig intelligens. Så jeg brugte faktisk to slags hjerner til den samme robot. Robotten er den samme lampe som I så, og jeg gav den to hjerner. Til halvdelen af folkene på gaden, gav jeg robotten en slags traditionel hjerne, en beregnet robot-hjerne. Den venter til sin tur, den analyserer alt, den planlægger. Lad os kalde det den beregnende hjerne. Den anden halvdel af folk fik sceneskuespillerhjernen, som tager risici. Lad os kalde det den eventyrlystne hjerne. Den handler sommetider uden at vide alt hvad den skal vide. Den laver nogle gange fejl, og retter dem. Og jeg fik dem til at udføre denne kedelige opgave, der tog næsten tyve minutter og de skulle arbejde sammen. På en eller anden måde simulere et fabriksarbejde, hvor man gentager det samme og det samme. Og dét jeg opdagede var at folk faktisk elskede den eventyrlystne robot. Og de troede den var mere intelligent, mere engageret, et bedre medlem af teamet, bidrog mere til teamets succes. De kaldte den endda "han" og "hun," hvorimod de, der mødte den beregnende hjerne, kaldte den "den." Og ingen kaldte den nogensinde "han" eller "hun." Når de talte om det efter opgaven med den eventyrlystne hjerne, så sagde de, "Til sidst var vi gode venner, og high-fivede mentalt." Hvad det så end betyder. (Folk griner). Det lyder smertefuldt Hvorimod folk med den beregnende hjerne sagde at det var ligesom en doven lærling. Den gjorde kun hvad den skulle, og intet mere. Hvilket er hvad folk forventer robotter skal gøre, så jeg var overrasket over at folk havde højere forventninger til robotter, end hvad nogen som helst indenfor robotteknologi troede robotter skulle kunne. Og på en måde, tænkte jeg, måske er det på tide -- ligesom Method Acting ændrede den måde folk tænkte på skuespil i det 19. århundrede, fra at være en meget beregnet, planlagt måde at geberde sig, til en mere intuitiv, risikovillig, kropsliggjort måde at gøre det på. Måske er det på tide for robotter at have den samme slags revolution.
to match every kind of emotion that they want to express. But the real revelation was when I learned about method acting. It became very popular in the 20th century. And method acting said you don't have to plan every muscle in your body; instead, you have to use your body to find the right movement. You have to use your sense memory to reconstruct the emotions and kind of think with your body to find the right expression -- improvise, play off your scene partner. And this came at the same time as I was reading about this trend in cognitive psychology, called embodied cognition, which also talks about the same ideas. We use our bodies to think; we don't just think with our brains and use our bodies to move, but our bodies feed back into our brain to generate the way that we behave. And it was like a lightning bolt. I went back to my office, I wrote this paper, which I never really published, called "Acting Lessons for Artificial Intelligence." And I even took another month to do what was then the first theater play with a human and a robot acting together. That's what you saw before with the actors. And I thought: How can we make an artificial intelligence model -- a computer, computational model -- that will model some of these ideas of improvisation, of taking risks, of taking chances, even of making mistakes? Maybe it can make for better robotic teammates. So I worked for quite a long time on these models and I implemented them on a number of robots. Here you can see a very early example with the robots trying to use this embodied artificial intelligence to try to match my movements as closely as possible. It's sort of like a game. Let's look at it. You can see when I psych it out, it gets fooled. And it's a little bit like what you might see actors do when they try to mirror each other to find the right synchrony between them. And then, I did another experiment, and I got people off the street to use the robotic desk lamp, and try out this idea of embodied artificial intelligence. So, I actually used two kinds of brains for the same robot. The robot is the same lamp that you saw, and I put two brains in it. For one half of the people, I put in a brain that's kind of the traditional, calculated robotic brain. It waits for its turn, it analyzes everything, it plans. Let's call it the calculated brain. The other got more the stage actor, risk-taker brain. Let's call it the adventurous brain. It sometimes acts without knowing everything it has to know. It sometimes makes mistakes and corrects them. And I had them do this very tedious task that took almost 20 minutes, and they had to work together, somehow simulating, like, a factory job of repetitively doing the same thing. What I found is that people actually loved the adventurous robot. They thought it was more intelligent, more committed, a better member of the team, contributed to the success of the team more. They even called it "he" and "she," whereas people with the calculated brain called it "it," and nobody ever called it "he" or "she." When they talked about it after the task, with the adventurous brain, they said, "By the end, we were good friends and high-fived mentally." Whatever that means. (Laughter) Sounds painful. Whereas the people with the calculated brain said it was just like a lazy apprentice. It only did what it was supposed to do and nothing more, which is almost what people expect robots to do, so I was surprised that people had higher expectations of robots than what anybody in robotics thought robots should be doing. And in a way, I thought, maybe it's time -- just like method acting changed the way people thought about acting in the 19th century, from going from the very calculated, planned way of behaving, to a more intuitive, risk-taking, embodied way of behaving -- maybe it's time for robots to have the same kind of revolution.
Et par år senere var jeg på mit næste forskningsjob på Georgia Tech i Atlanta, og jeg arbejdede i en gruppe som tog sig af robot-musikere. Og jeg tænkte, musik, det er det perfekte sted at lede efter samarbejde, koordination, timing, improvisation -- og vi fik denne robot som spillede marimba. Marima, for alle, der har det som jeg havde det, er en stor xylofon i træ. Og mens jeg så på dette, så jeg på andre arbejder indenfor menneske-robot improvisation -- Ja, der er andet arbejde i menneske-robot improvisation -- og de var også lidt som et spil skak. Mennesket ville spille noget, robotten ville analysere hvad der blev spillet, og improvisere sin egen del. Det er hvad musikere kalder "call and response" (kald-og-svar) interaktion, og det passer også meget godt på robotter og kunstig intelligens. Men jeg tænkte, hvis jeg bruger de samme ideer, som jeg brugte i teaterstykket og i samarbejdsstudierne, så kan jeg måske få robotterne til at jamme sammen ligesom et band Alle får deres riffs fra hinanden, ingen stopper det. Og så prøvede jeg at gøre de samme ting, denne gang med musik, hvor robotten ikke rigtig ved, hvad den skal til at spille. Den bevæger bare sin krop og bruger mulighederne for at spille, Og gør som min jazzlærer lærte mig da jeg var 17. Hun sagde, når du improviserer så ved du ikke altid hvad du laver, og du gør det alligevel. Og sådan prøvede jeg at lave en robot, der ikke rigtig ved hvad den laver, men stadig gør det. Så lad os se på et par sekunder fra denne optræden, hvor robotten lytter til den menneskelige musiker, og improviserer. Og se så hvordan mennesket også reagerer på hvad robotten gør, og reflekterer dens opførsel. På et tidspunkt bliver han endda overrasket over hvad robotten fandt på. (Musik)
A few years later, I was at my next research job at Georgia Tech in Atlanta, and I was working in a group dealing with robotic musicians. And I thought, music: that's the perfect place to look at teamwork, coordination, timing, improvisation -- and we just got this robot playing marimba. And the marimba, for everybody like me, it was this huge, wooden xylophone. And when I was looking at this, I looked at other works in human-robot improvisation -- yes, there are other works in human-robot improvisation -- and they were also a little bit like a chess game. The human would play, the robot analyzed what was played, and would improvise their own part. So, this is what musicians called a call-and-response interaction, and it also fits very well robots and artificial intelligence. But I thought, if I use the same ideas I used in the theater play and in the teamwork studies, maybe I can make the robots jam together like a band. Everybody's riffing off each other, nobody is stopping for a moment. And so I tried to do the same things, this time with music, where the robot doesn't really know what it's about to play, it just sort of moves its body and uses opportunities to play, and does what my jazz teacher when I was 17 taught me. She said, when you improvise, sometimes you don't know what you're doing, and you still do it. So I tried to make a robot that doesn't actually know what it's doing, but is still doing it. So let's look at a few seconds from this performance, where the robot listens to the human musician and improvises. And then, look how the human musician also responds to what the robot is doing and picking up from its behavior, and at some point can even be surprised by what the robot came up with. (Music)
(Applaus)
(Music ends) (Applause)
At være musiker handler ikke kun om at læse noder, ellers ville ingen nogensinde set et live show. Musikere kommunikerer også med deres kroppe, med de andre medlemmer af bandet, med publikum, de bruger kroppen til at udtrykke musikken. Og jeg tænkte, vi har allerede en robotmusiker på scenen, hvorfor ikke gøre den til en fuldblodsmusiker. Og jeg startede med at designe et socialt udtryksfuld hoved til robotten. Hovedet rører ikke ved marimbaen, det udtrykker bare hvordan musikken er. Dette er nogle servietskitser fra en bar i Atlanta, der lå et faretruende sted præcis halvvejs mellem mit laboratorium og mit hjem. (Folk griner) Så jeg brugte, gennemsnitligt, tre til fire timer om dagen der. Tror jeg. (Folk griner). Jeg tog tilbage til mine animationsredskaber, og prøvede at gennemskue, ikke bare hvad en robotmusiker skulle se ud som, men specielt hvordan en robotmusiker ville bevæge sig. For at vise at den måske ikke kan lide hvad den anden person spiller -- og måske vise hvilket beat den føler i øjeblikket.
Being a musician is not just about making notes, otherwise nobody would ever go see a live show. Musicians also communicate with their bodies, with other band members, with the audience, they use their bodies to express the music. And I thought, we already have a robot musician on stage, why not make it be a full-fledged musician? And I started designing a socially expressive head for the robot. The head doesn’t actually touch the marimba, it just expresses what the music is like. These are some napkin sketches from a bar in Atlanta that was dangerously located exactly halfway between my lab and my home. So I spent, I would say, on average, three to four hours a day there. I think. (Laughter) And I went back to my animation tools and tried to figure out not just what a robotic musician would look like, but especially what a robotic musician would move like, to sort of show that it doesn't like what the other person is playing -- and maybe show whatever beat it's feeling at the moment. So we ended up actually getting the money to build this robot, which was nice.
Vi endte med rent faktisk at få penge til at bygge denne robot, hvilket var rart. Jeg vil nu vise jer den samme slags optræden, denne gang med et socialt udtryksfuldt hoved. Og læg mærke til en ting -- hvordan robotten viser os det beat han samler op fra mennesket. Vi giver også mennesket en følelse af, at robotten ved hvad den laver. Og hvordan den ændrer sine bevægelser så snart den starter sin egen solo. (Musik) Nu kigger den på mig for at være sikker på at jeg lytter. (Musik) Og se nu på den sidste akkord i stykket igen, denne gang kommunikerer robotten med sin krop når den er travl med sin egen ting, og når den er klar til at koordinere den sidste akkord med mig. (Musik)
I'm going to show you now the same kind of performance, this time with a socially expressive head. And notice one thing -- how the robot is really showing us the beat it's picking up from the human, while also giving the human a sense that the robot knows what it's doing. And also how it changes the way it moves as soon as it starts its own solo. (Music) Now it's looking at me, showing that it's listening. (Music) Now look at the final chord of the piece again. And this time the robot communicates with its body when it's busy doing its own thing, and when it's ready to coordinate the final chord with me. (Music) (Music ending)
(Applaus)
(Final chord) (Applause)
Tak. Jeg håber I kan se hvor meget denne del af kroppen, som slet ikke rører instrumentet, faktisk hjælper med den musikalske optræden. Fordi vi er i Atlanta, kommer der selvfølgelig en rapper ind på vores laboratorium på et tidspunkt. Og vi fik en rapper til at komme ind og lave en lille jam med robotten. Og her kan i se robotten der responderer på beatet, og læg mærke til to ting. Ét, hvor uimodståeligt det er at følge robotten mens den bevæger hovedet. Du har nærmest lyst til at bevæge dit eget hoved mens den gør det. Og for det andet, selvom rapperen er meget fokuseret på sin iPhone, så snart robotten vender sig mod ham, så vender han mod den. Så selvom den kun er i periferien af hans synsfelt, den er kun i hans øjenkrog -- så er det meget stærkt. Og årsagen er, at vi ikke kan ignorere fysiske ting der bevæger sig i vores omgivelser. Det er vi programmerede til. Så hvis du har et problem med at din partner ser for meget på sin smartphone, så skal du måske have en robot til at fange opmærksomheden. (Folk griner) (Musik)
Thanks. I hope you see how much this part of the body that doesn't touch the instrument actually helps with the musical performance. And at some point -- we are in Atlanta, so obviously some rapper will come into our lab at some point -- and we had this rapper come in and do a little jam with the robot. Here you can see the robot basically responding to the beat. Notice two things: one, how irresistible it is to join the robot while it's moving its head. You kind of want to move your own head when it does it. And second, even though the rapper is really focused on his iPhone, as soon as the robot turns to him, he turns back. So even though it's just in the periphery of his vision, in the corner of his eye, it's very powerful. And the reason is that we can't ignore physical things moving in our environment. We are wired for that. So if you have a problem -- maybe your partner is looking at their iPhone or smartphone too much -- you might want to have a robot there to get their attention. (Laughter)
(Music)
(Applaus)
(Music ends) (Applause)
Jeg introducerer den sidste robot som vi har arbejdet på, som udsprang af noget overraskende, som vi opdagede: På et tidspunkt blev folk ligeglade med at robotten var så intelligent og kunne improvisere og lytte, og gøre alle disse kropsliggjorte intelligente ting, som jeg har brugt årevis på at udvikle. De kunne bare godt lide at robotten nød musikken. (Folk griner) Og de sagde ikke at robotten bevægede sig til musikken, de sagde at robotten nød musikken. Og vi tænkte, hvorfor tager vi ikke denne ide, og så designede jeg et nyt møbel. Denne gang var det ikke en skrivebordslampe, det var en højtaler dock. De der, som du sætter din smartphone i. Jeg overvejede hvad der ville ske, hvis din højtaler ikke bare spillede musikken for dig, men faktisk nød det samtidig. (Folk griner) Så her er igen nogle animationstests fra tidlige stadier. (Folk griner) Og her ser vi det færdige produkt. ("Drop It Like It's Hot")
Just to introduce the last robot that we've worked on, it came out of something surprising that we found: Some point people didn't care about the robot being intelligent, able to improvise and listen, and do all these embodied intelligence things that I spent years developing. They really liked that the robot was enjoying the music. (Laughter) And they didn't say the robot was moving to the music, they said "enjoying" the music. And we thought, why don't we take this idea, and I designed a new piece of furniture. This time it wasn't a desk lamp, it was a speaker dock, one of those things you plug your smartphone in. And I thought, what would happen if your speaker dock didn't just play the music for you, but would actually enjoy it, too? And so again, here are some animation tests from an early stage. (Laughter) And this is what the final product looked like. (Music)
Op og ned med hovedet. (Applaus) Og en masse hoveder op og ned i takt til musikken blandt publikum så vi kan stafig se at robotterne influerer folk. Og det er ikke kun sjov og narrestreger.
(Music ends) So, a lot of bobbing heads. (Applause) A lot of bobbing heads in the audience, so we can still see robots influence people. And it's not just fun and games.
Jeg tror en af årsagerne til at jeg går så meget op i robotter, som kommunikerer med kroppen, og bevæger kroppen -- og nu fortæller jeg en robottekniker-hemmelighed -- det er at hver eneste af jer vil komme til at leve med en robot på et tidspunkt i jeres liv. Et sted i jeres fremtid kommer der til at være en robot i jeres liv. Og hvis ikke i jeres, så i jeres børns liv. Og jeg vil gerne have disse robotter til at være -- til at være mere flydende, mere indtagende, mere elegante, end de er på nuværende tidspunkt. Og derfor tror jeg måske robotter skal være mindre som skakspillere og mere som sceneskuespillere og musikere. Måske skal de være i stand til at tage chancer og improvisere. Og måske skal de være i stand til at forvente hvad du skal til at gøre. Og de skal måske kunne lave fejl og rette fejlene, fordi vi er menneskelige. Og måske, ligesom med mennesker, så er robotter som er lidt uperfekte helt perfekte for os. Tak skal I have. (applaus)
I think one of the reasons I care so much about robots that use their body to communicate and use their body to move is -- I'm going to let you in on a little secret we roboticists are hiding -- is that every one of you is going to be living with a robot at some point in your life. Somewhere in your future, there will be a robot in your life. If not in yours, your children's lives. And I want these robots to be more fluent, more engaging, more graceful than currently they seem to be. And for that I think maybe robots need to be less like chess players and more like stage actors and more like musicians. Maybe they should be able to take chances and improvise. Maybe they should be able to anticipate what you're about to do. Maybe they even need to be able to make mistakes and correct them, because in the end, we are human. And maybe as humans, robots that are a little less than perfect are just perfect for us. Thank you. (Applause)